
Abstract
In this paper, we explore minimal surfaces and graphs in differential geometry. We derive the equation for a catenoid, a rotationally symmetric solution to the first variation of area functional for equidistant bounded discs. This analysis reveals two possible configurations for the catenoid, with an inner-radius and outer-radius catenoid that arise when the distance between the coaxial discs is below a critical threshold; we rigorously prove the stability of the outer-radius catenoid as the unique, area-minimizing surface. Additionally, we establish the rigidity and uniqueness of minimal (planar) graphs; we prove that the Dirichlet problem admits at most one minimal graph. Moreover, when the Dirichlet boundary curve lies in a plane, the corresponding minimal planar graph must reside entirely in the same plane.
Introduction
Plateau’s problem, first proposed in the late 18th century1 , asks whether a surface of minimal area exists under specific boundary constraints. Solutions to this problem, minimal surfaces, have since been studied extensively and have applications in fields such as physics, molecular biology, and architecture; for instance, minimal surfaces are used to model the apparent horizon of black holes2, describe the theoretical model of biomolecules3, and even inspire modern architecture4. As such, Differential Geometry, the broader context of minimal surfaces, remains a relevant field in mathematics, as it extends the familiar study of Euclidean geometry to higher-dimensional space to measure area, curvature, torsion, etc., using the tools of calculus, linear algebra, and topology.
This paper focuses on two specific cases of minimal surfaces: catenoids and minimal graphs. More specifically, we prove two main results: (i) that the outer-radius catenoid is stable and area-minimizing as the unique solution to Plateau’s problem, Theorem (4.2), and (ii) that the Minimal Graph Equation permits one unique solution, Theorem (5.3), implying that planar Dirichlet boundary conditions yield only the trivial planar minimal graph, in Corollary (5.1). While there exist previous proofs4 for the stability of the outer-radius catenoid, we provide a self-contained proof that avoids reliance on advanced background in Sturm-Liouville theory or Differential Geometry aside from that introduced in sections two and three, and is thus more attainable for a broader audience. Physically, regarding the stability of the catenoid, several soap ring experiments5,6 demonstrate the existence of two potential catenoid configurations bounded by coaxial rings, but that only the outer-radius catenoid is stable and persists under a critical separation distance d∗ between the rings; using the first and second variation of area functionals, we mathematically justify such observations.
In the Geometry of Surfaces section, we provide the necessary background in Differential Geometry to understand and prove the results of this paper. In section three, we investigate the context of Plateau’s problem and minimal surfaces, deriving important theorems in minimal surface theory for our main results. In section four, we present an overview of the catenoid and prove our first main result in Theorem (4.2) regarding the stability of the outer-radius catenoid. Finally, in section five, we introduce the Maximum Principle for linear elliptic equations and prove our second main result in Theorem (5.3) regarding the uniqueness of minimal graphs, concluding with Corollary (5.1).
Geometry of Surfaces
This section introduces the fundamental concepts in the geometry of surfaces to properly analyze minimal surfaces. Specifically, we need to answer the question of what defines the geometry of a surface? In its essence, a surface in  has three major properties: length, area, and curvature; the latter two will be critical for defining a minimal surface. However, to start, we need to establish a formal definition of a regular surface and its composition from a local parametrization.
has three major properties: length, area, and curvature; the latter two will be critical for defining a minimal surface. However, to start, we need to establish a formal definition of a regular surface and its composition from a local parametrization.
Definition 2.1 (Local Parametrization).
Let  represent a subset in
represent a subset in  . A map
. A map  is called a local parametrization of if the following conditions are satisfied:
is called a local parametrization of if the following conditions are satisfied:
 is
is  ; that is,
; that is,  is infinitely differentiable with respect to the codomain .
is infinitely differentiable with respect to the codomain . is a homeomorphism; i.e., is bijective, and both and
is a homeomorphism; i.e., is bijective, and both and  are continuous.
are continuous. , the cross product
, the cross product![\[\frac{\partial F}{\partial u} \times \frac{\partial F}{\partial v} \neq 0\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-483790a6499b56d2c3aadb03daaa1084_l3.png "Rendered by QuickLaTeX.com")
Note that the third condition in Definition 2.1 is necessary to establish the linear independence of the parametrization for ; i.e., the nonzero cross product implies that, at any point on  , the surface cannot locally collapse to a single point or curve and must permit local tangent planes everywhere. This property is vital for Definition 2.3.
, the surface cannot locally collapse to a single point or curve and must permit local tangent planes everywhere. This property is vital for Definition 2.3.
Definition 2.2 (Regular Surface). A subset  is called a regular surface if,
is called a regular surface if,  , there exists an open subset
, there exists an open subset  and a corresponding open subset
and a corresponding open subset  containing
containing  such that is a local parametrization.
such that is a local parametrization.
Importantly, we need to establish a local coordinate system on the surface to examine its behavior in space; specifically, we need a basis to reference the curvature and geometry of around an arbitrary point . Conveniently, the partial derivatives of a local parametrization  are well-defined (nonzero) everywhere on and are thus of interest for defining a local (tangent) plane.
are well-defined (nonzero) everywhere on and are thus of interest for defining a local (tangent) plane.
Definition 2.3 (Tangent Plane). Let  be a regular surface and
be a regular surface and  a point. If
a point. If  is a local parametrization around , then the tangent plane
is a local parametrization around , then the tangent plane  at is defined as
at is defined as
![\[T_pM := \text{span} \left{ \frac{\partial F}{\partial u}(p), \frac{\partial F}{\partial v}(p) \right}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-b66c606d9d848249d733c78dc5d61d44_l3.png "Rendered by QuickLaTeX.com")
Remark 2.1. ,  , since
, since  by Definition 2.1.
by Definition 2.1.
With the proper local coordinates, we can now proceed with analyzing the behavior and geometry of around a point ; namely, we can examine the properties of curvature, area and length associated with . The latter two are defined with respect to a local inner product; let  . Then
. Then
![\[\left\langle x,y \right\rangle = \begin{bmatrix} x_1 & x_2 & x_3 \end{bmatrix} \begin{bmatrix} \left\langle e_1,e_1 \right\rangle & \left\langle e_1,e_2 \right\rangle & \left\langle e_1,e_3 \right\rangle \\ \left\langle e_2,e_1 \right\rangle & \left\langle e_2,e_2 \right\rangle & \left\langle e_2,e_3 \right\rangle \\ \left\langle e_3,e_1 \right\rangle & \left\langle e_3,e_2 \right\rangle & \left\langle e_3,e_3 \right\rangle \end{bmatrix} \begin{bmatrix} y_1 \\ y_2 \\ y_3 \end{bmatrix}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-ac68f36a1cfa2dd6b7440fa99a552d65_l3.png "Rendered by QuickLaTeX.com")
such that
 for basis matrix
for basis matrix  .
.
First Fundamental Form. As alluded to earlier, we can express area and length attributed to a regular surface using a local inner product; to do so, we must define the first fundamental form and its matrix definition.
Definition 2.4 (First Fundamental Form). If is a regular surface, the first fundamental form of is the inner product on  for all , denoted as
for all , denoted as  .
.
Remark 2.2 (Matrix Form). Let  represent a local parametrization for a regular surface and have tangent plane . Then, for
represent a local parametrization for a regular surface and have tangent plane . Then, for  , by Definition 2.4, the first fundamental form for at is defined in its matrix form as
, by Definition 2.4, the first fundamental form for at is defined in its matrix form as
![\[g_p = \begin{bmatrix} \frac{\partial F}{\partial u_1}(p)\cdot\frac{\partial F}{\partial u_1}(p) & \frac{\partial F}{\partial u_1}(p)\cdot\frac{\partial F}{\partial u_2}(p) \\ \frac{\partial F}{\partial u_2}(p)\cdot\frac{\partial F}{\partial u_1}(p) & \frac{\partial F}{\partial u_2}(p)\cdot\frac{\partial F}{\partial u_2}(p) \end{bmatrix}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-63779e40869f074f82aa1da27c4117a2_l3.png "Rendered by QuickLaTeX.com")
Thus,
 .
.
Remark 2.3 (Length). Let represent a regular surface with local parametrization . Consider a parametrized curve  from the interval
from the interval ![I=[a,b]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-cd36d3d5c9815ec6acda7e5f6bab6a48_l3.png "Rendered by QuickLaTeX.com") . In , the length of
. In , the length of  is
is
![\[L(\gamma) = \int_a^b ||\gamma'(t)|| \, dt\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-e3cc4bcbb74e6770ad77775f97b1ea09_l3.png "Rendered by QuickLaTeX.com")
Since
 , we can express
, we can express  in terms of the local parametrization .
in terms of the local parametrization . ![\[\gamma(t) = F(u_1(t),u_2(t))\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-79239f9b292be93ec143595d13bd2a6f_l3.png "Rendered by QuickLaTeX.com")
![\[\gamma'(t) = \frac{\partial F}{\partial u_1}u_1'(t) + \frac{\partial F}{\partial u_2}u_2'(t)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-e36db98a3bcf52c3e883cce9b777f09e_l3.png "Rendered by QuickLaTeX.com")
![\[||\gamma'(t)|| = \sqrt{\langle\gamma'(t),\gamma'(t)\rangle} = \sqrt{g(\gamma'(t),\gamma'(t))}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-f7dba0d51531363cfb78ee69492c77bd_l3.png "Rendered by QuickLaTeX.com")
Thus, we can express the length of
in a more convenient form as ![\[\therefore L(\gamma) = \int_a^b \sqrt{g(\gamma'(t),\gamma'(t))} \, dt\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-fd30f1f1c1217e4bcad4536aa3cefe5b_l3.png "Rendered by QuickLaTeX.com")
Remark 2.4 (Area). Let  represent a closed region in the regular surface with local parametrization
represent a closed region in the regular surface with local parametrization  . Then, we know the surface area of
. Then, we know the surface area of  is
is
![\[\text{Area}(D) = \iint_U \left| \frac{\partial F}{\partial u_1} \times \frac{\partial F}{\partial u_2} \right| \, du_1 du_2\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-e0b6e97e5d104c652f8b710f10bb0e8a_l3.png "Rendered by QuickLaTeX.com")
However, we can further express this inner cross product in terms of the first fundamental form of
. 
Thus, we find the area of
as: ![\[\therefore \text{Area}(D) = \iint_U \sqrt{\det(g)} \, du_1 du_2\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-3d7ec1abcf6dbc9e0848c9c336058afa_l3.png "Rendered by QuickLaTeX.com")
Second Fundamental Form. Now that we have explored the length and area of regular surfaces, we can investigate the nature of curvature, defining the second fundamental form in order to so. It is important to note that the typical, inherent idea of curvature only exists in space curves in as a measure of the rate at which a curve changes direction; clearly, such a measure is well defined, as only has one tangent vector  at any point along its trace.
at any point along its trace.
However, in a regular surface  , there is no sole, unique tangent vector—only planes (). Thus, different curves along will often have varying curvatures, and so we must define curvature in the context of each “direction” along (in a similar manner to a “directional derivative”).
, there is no sole, unique tangent vector—only planes (). Thus, different curves along will often have varying curvatures, and so we must define curvature in the context of each “direction” along (in a similar manner to a “directional derivative”).
To start, by Definition 2.3, we know that the (linearly independent) partial derivatives of a local parametrization form the tangent plane for the corresponding regular surface; this composition implies that the cross product between them defines a form of normal vector.
More concretely, let represent a regular surface with local parametrization  around a point . Then, at , we can express the ‘‘normal vectors’’
around a point . Then, at , we can express the ‘‘normal vectors’’  as
as

Importantly, there exist two normal vectors (
 and
and  ), differing in signs; we note this distinction intuitively as
), differing in signs; we note this distinction intuitively as  pointing “outward” and “inward” with respect to a regular surface. As such, we often desire finding a continuous normal vector that allows us to distinguish between “in” and “out.” In this case, such regular surfaces are orientable if there exists a continuous choice of normal vector across the entire surface; instinctively, if there is a clear “inside” and “outside” for the surface. In this paper, we explicitly assume that all explored regular surfaces are orientable. In fact, most regular surfaces in are orientable, including those present in the later sections; see7 for a brief proof.
pointing “outward” and “inward” with respect to a regular surface. As such, we often desire finding a continuous normal vector that allows us to distinguish between “in” and “out.” In this case, such regular surfaces are orientable if there exists a continuous choice of normal vector across the entire surface; instinctively, if there is a clear “inside” and “outside” for the surface. In this paper, we explicitly assume that all explored regular surfaces are orientable. In fact, most regular surfaces in are orientable, including those present in the later sections; see7 for a brief proof.
Definition 2.5 (Gauss Map). Let be a regular, orientable surface. Then, the Gauss map  is a smooth map such that ,
is a smooth map such that ,  is the globally defined unit normal vector of at . We typically have
is the globally defined unit normal vector of at . We typically have  . See equation (2.1).
. See equation (2.1).
Definition 2.6 (Normal Curvature). Let be a regular surface with Gauss map  . For each and any unit vector
. For each and any unit vector  such that
such that  , we denote
, we denote  to be the plane in that contains and is spanned by and
to be the plane in that contains and is spanned by and  . If is the curve that is formed by the intersection of and , then the normal curvature at along , denoted by
. If is the curve that is formed by the intersection of and , then the normal curvature at along , denoted by  , is the signed curvature of at with respect to such that
, is the signed curvature of at with respect to such that
![\[k_n(p,e) = \gamma''(p)\cdot N(p)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-1f764a306fcd24e0504456e5fbf0fbc2_l3.png "Rendered by QuickLaTeX.com")
Theorem 2.1. Let be a regular surface with local parametrization and Gauss map . For a point and unit vector , express
![\[e = \sum_{i=1}^2 x_i \frac{\partial F}{\partial u_i}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-464e583352c246e7456d637820c8ddd9_l3.png "Rendered by QuickLaTeX.com")
Then, the normal curvature
is 
Proof. Let  represent the arc-length parametrized curve of the intersection of and
represent the arc-length parametrized curve of the intersection of and  for
for  , such that
, such that  and
and  .
.
Since  , we can express
, we can express
![\[\gamma(s) = F(u_1(s),u_2(s))\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-32694bb1e97ae66d7c3265f971ff9e73_l3.png "Rendered by QuickLaTeX.com")
![\[\gamma'(s) = u_1'(s)\frac{\partial F}{\partial u_1} + u_2'(s)\frac{\partial F}{\partial u_2} = \sum_{i=1}^2 u_i'(s)\frac{\partial F}{\partial u_i}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-46208ebe3d6dc7aae077f7f6906429dd_l3.png "Rendered by QuickLaTeX.com")
![\[\Rightarrow \gamma'(0) = e = \sum_{i=1}^2 u_i'(0)\frac{\partial F}{\partial u_i}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-dbac7d5a823f0d890c1cabecac140a66_l3.png "Rendered by QuickLaTeX.com")
![\[\therefore u_i'(0) = x_i\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-7117d0932b65c863295c11fc4cea452c_l3.png "Rendered by QuickLaTeX.com")
Thus, we find the second derivative of
as 

as desired.
From Theorem (2.1), we are inspired to define a map in a similar fashion as Definition (2.4) to measure the normal curvature on a regular surface. This directly leads us to define the second fundamental form.
Definition 2.7 (Second Fundamental Form). Let be a regular surface with Gauss map and local parametrization . Then, for , the second fundamental form of is a map  such that
such that
![\[h(x,y) = \sum_{i,j=1}^2 x_i y_j \left\langle \frac{\partial^2 F}{\partial u_i \partial u_j}, N \right\rangle\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-0201ae871eca7fea9a729aab76c2d3a2_l3.png "Rendered by QuickLaTeX.com")
evaluated at a given
.
Remark 2.5 (Matrix Form). Often, we express  in terms of a matrix:
in terms of a matrix:
![\[h_p = \begin{bmatrix} \left\langle \frac{\partial^2 F}{\partial u_1 \partial u_1}(p), N(p) \right\rangle & \left\langle \frac{\partial^2 F}{\partial u_1 \partial u_2}(p), N(p) \right\rangle \\ \left\langle \frac{\partial^2 F}{\partial u_2 \partial u_1}(p), N(p) \right\rangle & \left\langle \frac{\partial^2 F}{\partial u_2 \partial u_2}(p), N(p) \right\rangle \end{bmatrix}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-7956a56f4f5119fd745e4ad5fe15980a_l3.png "Rendered by QuickLaTeX.com")
such that
 .
.
Remark 2.6 (Normal Curvature). For , the normal curvature in the direction is given by
![\[k_n(p,e) = h(e,e)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-f8a9c5df8a47b3e35afbed144ab84b72_l3.png "Rendered by QuickLaTeX.com")
However, while we can now find the normal curvature along any vector in relative to a point , several questions still arise: namely, which directions minimize/maximize the normal curvature and the respective implications. As such, we desire to optimize  given that for some .
given that for some .
To do so, define
for a fixed point
 with local parametrization and Gauss map . Let
with local parametrization and Gauss map . Let ![h=[h_{ij}]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-3ee060d88d336ad41ce14f199d1f2f74_l3.png "Rendered by QuickLaTeX.com") and
and ![g=[g_{ij}]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-ba44c93b7505c06c222b101e20462044_l3.png "Rendered by QuickLaTeX.com") . Then, define
. Then, define ![\[H(x_1,x_2) = h(e,e) = h_{11}x_1^2 + 2h_{12}x_1x_2 + h_{22}x_2^2\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-bb0e277007e11684dcd51d78058de1bc_l3.png "Rendered by QuickLaTeX.com")
![\[G(x_1,x_2) = g(e,e) = g_{11}x_1^2 + 2g_{12}x_1x_2 + g_{22}x_2^2\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-135db7cb6471b830226627c59d00ae77_l3.png "Rendered by QuickLaTeX.com")
Thus, we desire to optimize
 subject to the constraint
subject to the constraint  ; using a Lagrange multiplier, we must solve the system
; using a Lagrange multiplier, we must solve the system 

Expanding equation (2.2), we are left with the system


Furthermore, noting the symmetry of
 and , we can rewrite equations (2.4) and (2.5) as
and , we can rewrite equations (2.4) and (2.5) as 
![\[\therefore h \begin{bmatrix} x_1 \ x_2 \end{bmatrix} = \lambda g \begin{bmatrix} x_1 \ x_2 \end{bmatrix}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-89e5c6b65b50f7dff277614cb74a90ec_l3.png "Rendered by QuickLaTeX.com")
To solve equation (2.6), we note that
is invertible since  by Definition (2.1). Thus, we may solve for given that
by Definition (2.1). Thus, we may solve for given that 
We therefore conclude from equation 2.7 that the extrema
 is an eigenvector of
is an eigenvector of  with eigenvalue
with eigenvalue  .
.
Definition 2.8 (Shape Operator). For a regular surface , the shape operator of is a map  such that
such that 
Furthermore, we define the eigenvalues of  as the principal curvatures, which are the critical values of given that . Note that this fact follows briefly as
as the principal curvatures, which are the critical values of given that . Note that this fact follows briefly as
![\[h(e,e) = e^T h e = e^T(\lambda g e) e = \lambda e^T g e = \lambda\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-a48a0ee1f8cb1012fbdcd00b5d0df1fb_l3.png "Rendered by QuickLaTeX.com")
Finally, since
 , there must exist two real principal curvatures, denoted as
, there must exist two real principal curvatures, denoted as  and
and  . As such, we often consider only the sum and products of the two.
. As such, we often consider only the sum and products of the two.
Definition 2.9 (Mean Curvature & Gauss Curvature). For a point on a regular surface with first fundamental form and second fundamental form , the mean curvature of , denoted by  , is given by
, is given by
![\[H = \frac{\lambda_1+\lambda_2}{2} = \frac{1}{2}\text{tr}(g^{-1}h)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-a81c4dcf39cdc5222f2a3c9baa2eeb11_l3.png "Rendered by QuickLaTeX.com")
and the Gauss curvature, denoted by
 , is given by
, is given by ![\[K = \lambda_1\lambda_2 = \det(g^{-1}h) = \frac{\det(h)}{\det(g)}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-d8b9d296094a06163aae246205cc9e71_l3.png "Rendered by QuickLaTeX.com")
where
and are the principal curvatures.
Here, for both the mean and Gauss curvature, we calculate them under the gauss map with the normal vector that (globally, under the orientability assumption) points outward from the enclosed volume of the surface; as such, the sign for the mean curvature is positive for all convex regions.
Minimal Surfaces
This section will introduce the notion of and context for minimal surfaces, providing the necessary background for the main results of this paper in regard to catenoids and minimal graphs. However, we must first explore the motivating problem that introduced minimal surfaces.
Plateau’s Problem. Given a closed curve  of class
of class  , find a regular surface such that
, find a regular surface such that  and
and  , where is the set of all regular surfaces in that span .
, where is the set of all regular surfaces in that span .
To solve Plateau’s Problem, we must employ the first variation of area functional; however, we require context. For a fixed closed and smooth curve , let be a regular surface that spans with local parametrization and Gauss map . Consider a family of variational surfaces  that span for with
that span for with  . Then, let the local parametrization
. Then, let the local parametrization  of be of the form
of be of the form

for smooth
 such that
such that  on
on  .
.
We restrict our examination to fixed boundary conditions, so  is sufficient, and no additional-order boundary conditions arise. Note that since
is sufficient, and no additional-order boundary conditions arise. Note that since  by Definition 2.1.
by Definition 2.1.  . In fact, for all orientable surfaces, must be differentiable; see7 for more detailed explanation. As such, is differentiable.
. In fact, for all orientable surfaces, must be differentiable; see7 for more detailed explanation. As such, is differentiable.
Let  such that
such that


Now, if  solves Plateau’s Problem, then
solves Plateau’s Problem, then

by Remark (2.4).
Lemma 3.1. Let  be a family of symmetric, invertible
be a family of symmetric, invertible  matrices. Then,
matrices. Then,
![\[\frac{d}{ds}\ln(\det(g(s))) = \text{tr}\left(g(s)^{-1}\frac{d}{ds}g(s)\right)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-1628bcbe1ee93104958cc6a4ea6ddec6_l3.png "Rendered by QuickLaTeX.com")
Proof. Let  be eigenvalues for .
be eigenvalues for .
![\begin{align*} \frac{d}{ds}\ln(\det(g(s))) &= \frac{d}{ds}\ln(\lambda_1(s)\lambda_2(s)\dots\lambda_n(s)) \\ &= \frac{d}{ds}(\ln(\lambda_1(s)) + \ln(\lambda_2(s)) + \dots + \ln(\lambda_n(s))) \\ &= \frac{\lambda_1'(s)}{\lambda_1(s)} + \frac{\lambda_2'(s)}{\lambda_2(s)} + \dots + \frac{\lambda_n'(s)}{\lambda_n(s)} \\ &= \text{tr} \left( \left[ \begin{smallmatrix} \lambda_1^{-1}(s) & \dots & 0 \ \vdots & \ddots & \vdots \\ 0 & \dots & \lambda_n^{-1}(s) \end{smallmatrix} \right] \left[ \begin{smallmatrix} \lambda_1'(s) & \dots & 0 \ \vdots & \ddots & \vdots \\ 0 & \dots & \lambda_n'(s) \end{smallmatrix} \right] \right) \\ &= \text{tr} \left( g(s)^{-1}\frac{d}{ds}g(s) \right) \end{align*}](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-2caedbf204ead09e854ebfc628bf0b2f_l3.png "Rendered by QuickLaTeX.com")
Applying Lemma (3.1), we have

Furthermore, since  , we know
, we know



Now we substitute equation (3.6) into equation (3.4).

Finally, we plug equation (3.7) into (
 ) and conclude with the Minimal Surface Equation:
) and conclude with the Minimal Surface Equation:
Theorem 3.1 (Minimal Surface Equation). The First Variation of Area of a regular surface is given as
![\[\frac{d}{ds}\text{Area}(M(s)) \Big|{s=0} = -\iint_M \varphi H \sqrt{\det(g)} \, du_1 du_2\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-49285084f4b8a482430bda8d7ea1b047_l3.png "Rendered by QuickLaTeX.com")
 is a solution to Plateau’s Problem, then
is a solution to Plateau’s Problem, then ![\[\frac{d}{ds}\text{Area}(M(s)) \Big|{s=0} = 0\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-876dd998bfe9026250ff3f36854addb2_l3.png "Rendered by QuickLaTeX.com")
for all choices of variation
. However, this implies that must solve the Minimal Surface Equation: ![\[H = 0\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-c6b6636e8a3bbad06672dbac3056f236_l3.png "Rendered by QuickLaTeX.com")
everywhere on
.
Definition 3.1 (Minimal Surface). A regular surface is a minimal surface if it is a solution to the Minimal Surface Equation; namely, if  everywhere on .
everywhere on .
Remark 3.1. While we call regular surfaces that have a zero mean curvature everywhere “minimal surfaces,” they do not necessarily solve Plateau’s Problem; often, when solving for generalized minimal surfaces given boundaries, multiple solutions satisfying the Minimal Surface Equation arise, while some may not be truly “area-minimizing.” Put simply, satisfying the Minimal Surface Equation is not enough to warrant a surface a solution to Plateau’s Problem; refer to Theorem (4.1).
Catenoids
This section will introduce the catenoid and its properties as a minimal surface, providing the background for and proving the main result of the outer-radius catenoid’s stability. However, we must first define what a catenoid is; in order to do so, we pose a question: what is the solution to Plateau’s Problem for two separated, equiradial rings? Or more succinctly, what surface that connects two rings has the smallest possible surface area?
Formally, we can answer this question using the Minimal Surface Equation. Fix two unit circles and at and , respectively, as seen in Figure 1.
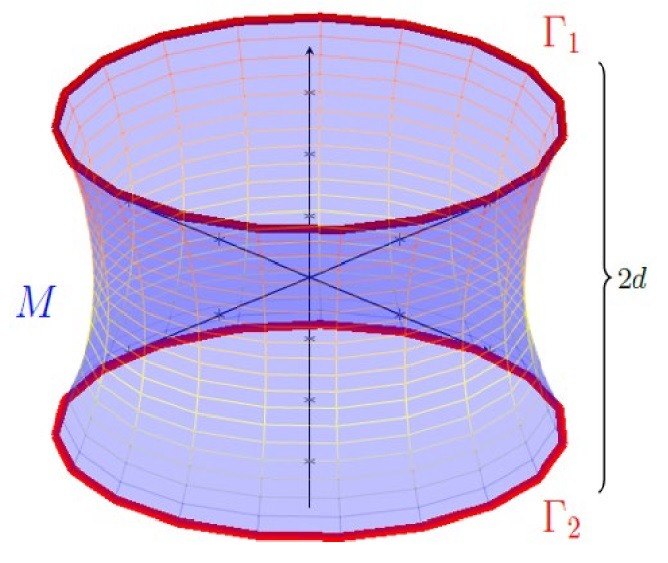
We want to find a minimal surface such that . Let us also assume that M is rotationally symmetric. A simple argument can be made that M must be rotationally symmetric because the boundary conditions are symmetric; if a solution for M were not rotationally symmetric, then there must exist an infinite number of solutions identical to M (but rotated slightly) that are also area-minimizing. However, this violates uniqueness; see8,9 for more. Thus, we may locally parametrize M as
Thus, we may locally parametrize M as

for some strictly positive  with
with ![z\in[-d,d]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-f84a2b48a4da722e5c68cc17b681c80b_l3.png "Rendered by QuickLaTeX.com") and
and ![\theta\in[0,2\pi]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-cd45783d8ab41aaf30ca3e136c346d59_l3.png "Rendered by QuickLaTeX.com") . Therefore, our objective is to solve for
. Therefore, our objective is to solve for  .
.
First, we compute the first fundamental form of .
![\[\frac{\partial F}{\partial z} = (f'(z)\cos(\theta), f'(z)\sin(\theta), 1)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-8cc37afeab531dfa56adb27df4d74946_l3.png "Rendered by QuickLaTeX.com")
![\[\frac{\partial F}{\partial \theta} = (-f(z)\sin(\theta), f(z)\cos(\theta), 0)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-aefa75fc0c1c26dbf4e422c986ce96dc_l3.png "Rendered by QuickLaTeX.com")
Thus, by Definition (2.4), the first fundamental form is given as

Further, we can also compute the Gauss map and second fundamental form for M.

So, by Definition (2.5), we have

where the global (due to assumed orientability) direction of is of the form in equation (2.1). Furthermore, by Definition (2.7), we also find

Thus, by Definition (2.8), we compute S as

As such, by Definition (2.9), the mean curvature of M is

Therefore, by Theorem (3.1), the Minimal Surface Equation for M is given by
( )
) 
where  . To find a solution for (), let
. To find a solution for (), let
![\[q(z) = \frac{f(z)}{\sqrt{1+(f'(z))^2}}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-1670e6d94de1a3a9207e3bac2f4400fe_l3.png "Rendered by QuickLaTeX.com")
Then, we have

by (). However, equation (4.7) implies that  , for some constant
, for some constant  . Thus, we can solve for .
. Thus, we can solve for .

for some integration constant  . However, since M is symmetric about
. However, since M is symmetric about  , we note that
, we note that  . This fact follows directly from the boundary conditions, , so
. This fact follows directly from the boundary conditions, , so  by the symmetry of the hyperbolic cosine function. Thus, we simplify equation (4.8) and conclude
by the symmetry of the hyperbolic cosine function. Thus, we simplify equation (4.8) and conclude

Finally, we must find the value of C in equation (4.9) given that  . Furthermore, according to equation (4.9), C must be the minimum value of , attained at . This fact is because
. Furthermore, according to equation (4.9), C must be the minimum value of , attained at . This fact is because  for all
for all  . Accordingly, we are brought to the definition of a catenoid.
. Accordingly, we are brought to the definition of a catenoid.
Definition 4.1 (Catenoid). A catenoid is the unique, non-planar minimal surface of revolution in given by the local parametrization
![\[F(u,v) = (a\cosh(v/a)\cos(u), a\cosh(v/a)\sin(u), v)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-150f74132433eb415ea2342c5244e2ae_l3.png "Rendered by QuickLaTeX.com")
for some real  . This is equivalent to the initial conditions of two equiradial disks in Plateau’s Problem at the start of this section.
. This is equivalent to the initial conditions of two equiradial disks in Plateau’s Problem at the start of this section.
Note that in Definition (4.1),  , where
, where  , according to the boundary conditions. As such, define
, according to the boundary conditions. As such, define

Thus, a connected solution only exists if  has a positive root. Observe, however, that as
has a positive root. Observe, however, that as  , we have
, we have  . Furthermore, as
. Furthermore, as  , we also have . Thus, we know
, we also have . Thus, we know  attains a global minimum when
attains a global minimum when  . cannot have any local extrema because the hyperbolic cosine function is strictly concave everywhere; that is, since
. cannot have any local extrema because the hyperbolic cosine function is strictly concave everywhere; that is, since  everywhere, no local extrema (maxima) can occur, and so the only extrema is the global minimum.
everywhere, no local extrema (maxima) can occur, and so the only extrema is the global minimum.
This fact leads us to suspect that for certain separation distances between  and
and  ,
,  , and there will consequently be no solutions for . To demonstrate this fact, we must first find the minimum of .
, and there will consequently be no solutions for . To demonstrate this fact, we must first find the minimum of .

![\[\Rightarrow \cosh\left(\frac{d}{C}\right) = \frac{d}{C}\sinh\left(\frac{d}{C}\right)\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-4281a67504760c09c3c8b3ecee28e17d_l3.png "Rendered by QuickLaTeX.com")
![\[\Rightarrow \tanh\left(\frac{d}{C}\right) = \frac{C}{d}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-742c0394c0f9864d9b2387d3397dd9ef_l3.png "Rendered by QuickLaTeX.com")
![\[\therefore \tanh(s) = \frac{1}{s}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-ecf1868c995be9812bb5434ed721b83e_l3.png "Rendered by QuickLaTeX.com")
where  . Implicitly solving equation (4.11) for
. Implicitly solving equation (4.11) for  , we arrive at one unique solution
, we arrive at one unique solution  . Thus, for a given
. Thus, for a given  , we have that attains its minimum when
, we have that attains its minimum when  .
.
However, also observe that when , then  . This is once again because . However, because is strictly positive, we have
. This is once again because . However, because is strictly positive, we have  , so . This fact, of course, conforms with our intuition, as is the minimal radius from to the
, so . This fact, of course, conforms with our intuition, as is the minimal radius from to the  -axis, and as such must be strictly less than the boundary disk radius.
-axis, and as such must be strictly less than the boundary disk radius.
Now that we have  , we substitute into equation (4.10) to find the minimum value of as
, we substitute into equation (4.10) to find the minimum value of as

Thus, for connected solutions for M to exist, we want  . Rearranging equation (4.12) to satisfy this inequality, we are left with
. Rearranging equation (4.12) to satisfy this inequality, we are left with

Consequently, when becomes too large ( ), there are no solutions for the equation and thus no connected solutions for , as we expect. As alluded to in the introduction, this can be seen with real experiments; soap ring bubbles form a catenoid until their separation distance exceeds a certain value, at which point the connecting bubble abruptly pops. See10,11 for more.
), there are no solutions for the equation and thus no connected solutions for , as we expect. As alluded to in the introduction, this can be seen with real experiments; soap ring bubbles form a catenoid until their separation distance exceeds a certain value, at which point the connecting bubble abruptly pops. See10,11 for more.
When  , one unique solution
, one unique solution  exists. However, in the case when
exists. However, in the case when  , it is clear that multiple solutions for exist; Figure 2 displays plots of for different values of . For , there are two solutions:
, it is clear that multiple solutions for exist; Figure 2 displays plots of for different values of . For , there are two solutions:  and
and  , where
, where  . Since
. Since  , we call and the inner and outer-radius catenoid, respectively. Figure 3 displays both catenoids,
, we call and the inner and outer-radius catenoid, respectively. Figure 3 displays both catenoids,  and
and  , corresponding to and , respectively.
, corresponding to and , respectively.
By inspection, we intuitively suspect that has a smaller surface area than ; however, this result must be proven rigorously. As such, we will prove Theorem (4.2), one of the main results of this paper; namely, that when the outer-radius catenoid is the solution to Plateau’s Problem for the Dirichlet boundary conditions depicted in Figure 1, while the inner-radius catenoid is not.
Second Variation of Area.
Lemma 4.1. It should be stated that this Lemma is known as Weingarten’s Formula. For additional proof, see7. Let be a regular surface with local parametrization , first fundamental form , second fundamental form , shape operator ![S=[S_{ij}]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-523e5bc5ade4bbd66a4afe71795bdf18_l3.png "Rendered by QuickLaTeX.com") , and Gauss map . Then,
, and Gauss map . Then,
![\[\frac{\partial N}{\partial u_i} = -\sum_{j=1}^2 S_{ij}\frac{\partial F}{\partial u_j}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-ab983a838186f3460c795126993449a0_l3.png "Rendered by QuickLaTeX.com")
Proof. Since  , it follows that
, it follows that  . Thus, we can write
. Thus, we can write

for some coefficients  . Furthermore, we differentiate
. Furthermore, we differentiate  with respect to
with respect to  to find
to find

However, since  by Definition (2.7), we simplify equation (4.15) and have
by Definition (2.7), we simplify equation (4.15) and have

But using equation (4.14), we also have

because  , by Definition (2.4). Thus, we compare
, by Definition (2.4). Thus, we compare  in equations (4.16) and (4.17) and conclude
in equations (4.16) and (4.17) and conclude

However, with respect to the coordinate basis  , equation (4.18) expands to the matrix equation
, equation (4.18) expands to the matrix equation


for  . By definition, equation (4.20) implies
. By definition, equation (4.20) implies

Thus, plugging equation (4.21) into equation (4.14), we get our desired result.
Lemma 4.2. Let  be a family of regular surfaces with local parametrizations in the form of equation (3.1), first fundamental form , and shape operator , such that . Then,
be a family of regular surfaces with local parametrizations in the form of equation (3.1), first fundamental form , and shape operator , such that . Then,
(a) 
(b) 
where  is the surface gradient of
is the surface gradient of  for smooth .
for smooth .
Proof. Since  from equation (3.6), the result for (a) trivially follows. As for (b), first consider
from equation (3.6), the result for (a) trivially follows. As for (b), first consider  . By equation (3.5), we have
. By equation (3.5), we have
![\[g'(s)_{ij} = \left\langle \frac{\partial V}{\partial u_i},\frac{\partial \stackrel{\sim}F}{\partial u_j} \right\rangle + \left\langle \frac{\partial \stackrel{\sim}F}{\partial u_i},\frac{\partial V}{\partial u_j} \right\rangle\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-751c79bbf83ba60cb9139d953c79eb31_l3.png "Rendered by QuickLaTeX.com")
for  . Therefore, we compute
. Therefore, we compute  as
as

Thus, from equation (4.22), we conclude

as desired. Note that sign conventions depending on metric signature might flip  trace sign in some contexts, but follows derivation above.
trace sign in some contexts, but follows derivation above.
For a minimal surface M to be the solution to Plateau’s Problem, we must confirm that M is indeed area-minimizing while satisfying the Minimal Surface Equation; this implies that the area of M would satisfy the “second derivative test.” As such, we are brought to the definition of the Second Variation of Area.
Theorem 4.1 (Second Variation of Area). Let be a family of regular surfaces with local parametrizations in the form of equation (3.1), first fundamental form , and shape operator , such that , where is a minimal surface. Then, the Second Variation of Area of is given as

for all smooth such that on .
Remark 4.1. A minimal surface is locally minimizing if
![\[\iint_M \left( \mid \nabla_M\varphi \mid^{2} - \text{tr}(S^2)\varphi^2 \right) \sqrt{\det(g)} \, du_1 du_2 > 0\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-7db8b4e04be979924a85139c950a6a02_l3.png "Rendered by QuickLaTeX.com")
with on . This is the second derivative test for the area of M.
Proof. From (), we find

Thus, we must find  . Recall from equation (3.4) that we have
. Recall from equation (3.4) that we have
![\[\frac{\partial}{\partial s}\sqrt{\det(g(s))} = \frac{1}{2}\sqrt{\det(g(s))}\text{tr}(g(s)^{-1}g'(s))\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-291ea112100fe3fa933480bf3cbcbaf4_l3.png "Rendered by QuickLaTeX.com")

This result comes simply from  .
.
![\[\Rightarrow \frac{\partial^2}{\partial s^2}\sqrt{\det(g(s))}\Big|_{s=0} = \frac{1}{2}\sqrt{\det(g(0))}\text{tr}(g(0)^{-1}g''(0))\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-289a2937058570f3d0c2cc5194414562_l3.png "Rendered by QuickLaTeX.com")
because  since
since  is a minimal surface. Finally, we substitute Lemmas (4.2, a) and (4.2, b) into equation 4.25 and obtain our desired result.
is a minimal surface. Finally, we substitute Lemmas (4.2, a) and (4.2, b) into equation 4.25 and obtain our desired result.
Now, we will prove the main result of this section, Theorem (4.2).
Outer-Radius Catenoid Stability
Theorem 4.2 (Outer-Radius Catenoid Stability). Consider Plateau’s Problem for the boundary curves  consisting of two coaxial unit discs in , as seen in Figure 1, such that
consisting of two coaxial unit discs in , as seen in Figure 1, such that  for , where
for , where  is defined in equation (4.13). Consequently, there exist two catenoids
is defined in equation (4.13). Consequently, there exist two catenoids  and
and  such that
such that  , and
, and  . Then, is stable, while is unstable; i.e. is the unique solution to Plateau’s Problem.
. Then, is stable, while is unstable; i.e. is the unique solution to Plateau’s Problem.
Proof. We present a self-contained proof of Theorem (4.2). However, for a more concise proof using Sturm-Liouville theory, see12. We will start by proving that Area() < Area() and then prove that is indeed the unique solution to Plateau’s Problem by using Theorem (4.1).
First, note that  is parametrized by equation (4.1), where
is parametrized by equation (4.1), where

from equation (4.9). Further, by equation (4.2), the first fundamental form for is given by

and its inverse as

Therefore, we also have

and

by equation (4.5). Thus, we compute

Now, by Remark (2.4), we calculate Area() as

Define  and function
and function  such that
such that

According to equation (4.10, we must have that

and consequently

These two equalities are because  in equation (4.10). Therefore, we simplify
in equation (4.10). Therefore, we simplify  as
as

by equations (4.34) and (4.35). Define a function  such that
such that

where

according to equation (4.35). Also note that equation (4.38) implies that

Thus, we find  as
as

Hence, from equations (4.36) and (4.40), we have that  . This implies that
. This implies that

since  , where
, where  . However, equation (4.41) implies that the difference between
. However, equation (4.41) implies that the difference between  and
and  , denoted as
, denoted as  , is strictly decreasing as increases. As such, we bound this difference by considering the endpoints in the interval
, is strictly decreasing as increases. As such, we bound this difference by considering the endpoints in the interval  . Note that in equation (4.38), the maximum value of
. Note that in equation (4.38), the maximum value of  occurs when
occurs when  and thus when . Therefore, at , we have that
and thus when . Therefore, at , we have that  and hence
and hence  . However, in our interval for , we have , and so
. However, in our interval for , we have , and so  by equation (4.41). As increases, decreases, so by the converse, as decreases, increases. Thus, we conclude that
by equation (4.41). As increases, decreases, so by the converse, as decreases, increases. Thus, we conclude that  . However, by equation (4.32), we also note
. However, by equation (4.32), we also note

By equation (4.42), it therefore suffices to show that if is area-minimizing, it then must be the unique solution to Plateau’s Problem.
Let  and
and  . Now consider the Second Variation of Area for . Let
. Now consider the Second Variation of Area for . Let  be a variational function such that
be a variational function such that  and
and  . That is, we only consider axisymmetric variations and not rotational ones; this restriction is necessary, as rotational variations will not distinguish stability between the catenoids. We define a
. That is, we only consider axisymmetric variations and not rotational ones; this restriction is necessary, as rotational variations will not distinguish stability between the catenoids. We define a  instead of
instead of  since M is rotationally symmetrical and surface perturbations will therefore be independent of
since M is rotationally symmetrical and surface perturbations will therefore be independent of  . Furthermore, non-axisymmetrical perturbations will result in apparent stability for both catenoids, which is unfavorable for our proof13.
. Furthermore, non-axisymmetrical perturbations will result in apparent stability for both catenoids, which is unfavorable for our proof13.
By Theorem (4.1), we therefore have

where  is defined as
is defined as

In a similar manner to earlier, define  . Now, consider the function
. Now, consider the function

Then we find the derivatives of  as
as


Observe now that equation (4.47) implies that  . Furthermore, on the interval , the function is strictly positive. This is because
. Furthermore, on the interval , the function is strictly positive. This is because  for all , and thus
for all , and thus  at the unique solution
at the unique solution  . However, since
. However, since  , we have
, we have  , so
, so  for all (since
for all (since  ). This implies that
). This implies that  . Thus, for some continuous function such that
. Thus, for some continuous function such that  , define
, define

Then, by equation (4.44), consider

Now we substitute equation (4.49) into equation (4.43).

Here we used integration by parts on  . Therefore, by equation (4.50), we conclude that
. Therefore, by equation (4.50), we conclude that

and thus, by Remark (4.1), it follows that M is a solution to Plateau’s Problem. Furthermore, as we have proven in equation (4.42), , while satisfying the Minimal Surface Equation, cannot be a solution. A similar argument made in equation (4.50) cannot be made for ; since  , the function has a root and thus is not a continuous function. Therefore,
, the function has a root and thus is not a continuous function. Therefore,  is the unique solution; the outer-radius catenoid is stable and area-minimizing while the inner-radius catenoid is not.
is the unique solution; the outer-radius catenoid is stable and area-minimizing while the inner-radius catenoid is not.
Minimal Graphs
This section will introduce the necessary background into minimal graphs, a specific class of minimal surfaces; furthermore, we will prove the main result of the uniqueness of minimal (planar) graphs. However, we must first introduce the definition of minimal graphs.
Definition 5.1 (Minimal Graph). Let  be a bounded domain. Then, a regular surface is called a minimal graph if
be a bounded domain. Then, a regular surface is called a minimal graph if
![\[M = \{ (x,y,f(x,y))\in\mathbb{R}^3 : (x,y)\in\Omega \}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-18da770678802b288e956e43462a6b2b_l3.png "Rendered by QuickLaTeX.com")
is a minimal surface, where  .
.
In a similar manner to the Minimal Surface Equation, we desire to find a generalized equation to determine if a regular surface M is a minimal graph; to do so, we must solve the Minimal Surface Equation for M. Let be a regular surface in the form of Definition (5.1). Then, the local parametrization of M is

Thus, according to Definition (2.4), the first fundamental form of M is given as

and we also have

Therefore, we compute the inverse of g as

By Definition (2.5), find the Gauss map N as

and by Definition (2.7), the second fundamental form is then

Therefore, by Definition (2.8), we compute the shape operator as

Finally, by Definition (2.9), the mean curvature is then

Now, by Theorem (3.1), we are motivated to define the Minimal Graph Equation.
Theorem 5.1. For a bounded domain , a regular surface in the form of
 is a minimal graph if
is a minimal graph if  for a function
for a function  .
.
Now that we have the Minimal Graph Equation defined, we will prove the main result of this section; specifically, we will conclude the uniqueness of minimal graphs, in Theorem (5.3), and the uniqueness of planar graphs for boundaries confined in a plane in , in Corollary (5.1).
First, consider Plateau’s Problem for the following:
Let be a bounded domain with smooth curve  above
above  such that
such that 
Consider then a regular surface such that 
where  . Then, we will prove in Theorem (5.3) that is unique. However, we will need to first explore the Maximum Principle for linear elliptic equations.
. Then, we will prove in Theorem (5.3) that is unique. However, we will need to first explore the Maximum Principle for linear elliptic equations.
Maximum Principle. Let be a bounded domain. Define the function  and the linear operator
and the linear operator  such that
such that

where  are smooth functions. Then, is called elliptic if the symmetric matrix
are smooth functions. Then, is called elliptic if the symmetric matrix

for all  .
.  is positive definite; i.e.,
is positive definite; i.e., 
 . When we have
. When we have  , we have an elliptic equation, and thus we can apply the Maximum Principle.
, we have an elliptic equation, and thus we can apply the Maximum Principle.
Theorem 5.2 (Maximum Principle). Note here that Theorem (5.2) is actually the weak Maximum Principle; for a proof of the strong version with a generalization to  , see14. Let be a bounded domain with the smooth function and operator as defined in equation (5.11). Then, if , we have
, see14. Let be a bounded domain with the smooth function and operator as defined in equation (5.11). Then, if , we have
![\[\max_\Omega u = \max_{\partial\Omega} u \quad\text{and}\quad \min_\Omega u = \min_{\partial\Omega} u\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-7bceb73e71745166ac575aed16dee4fa_l3.png "Rendered by QuickLaTeX.com")
Proof. The following proof is adapted from Colding and Minicozzi15. We prove this by contradiction. Suppose a function  reaches a global maximum inside
reaches a global maximum inside  ; i.e., there exists a
; i.e., there exists a  such that
such that  attains a maximum. Then, by the first derivative test, we have
attains a maximum. Then, by the first derivative test, we have  . Furthermore, by the second derivative text, we also have
. Furthermore, by the second derivative text, we also have

where  denotes the Hessian matrix. Therefore, we find
denotes the Hessian matrix. Therefore, we find

where ![A=[a_{ij}(x_1,x_2)]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-bb7ce3d32bb3041e7383eecf3565ac43_l3.png "Rendered by QuickLaTeX.com") is defined in equation (5.12). In general, if we have an
is defined in equation (5.12). In general, if we have an  symmetric positive definite matrix A and negative semidefinite matrix B, we have that tr(AB)
symmetric positive definite matrix A and negative semidefinite matrix B, we have that tr(AB)  0. The proof for this comes simply when we define a matrix
0. The proof for this comes simply when we define a matrix  and consider the definiteness of C, where
and consider the definiteness of C, where  for all
for all  . Thus, from equation (5.11), we have
. Thus, from equation (5.11), we have

Now consider a function such that . Define

where  and
and  are arbitrary real numbers. Then, suppose that
are arbitrary real numbers. Then, suppose that  attains a maximum at . Then, by equation (5.15), we find
attains a maximum at . Then, by equation (5.15), we find

However, we want to show that  to arise at a contradiction; also consider
to arise at a contradiction; also consider

However, we also have

for some  , since A is positive definite. Therefore, we use equation (5.19) and rewrite equation (5.18) as
, since A is positive definite. Therefore, we use equation (5.19) and rewrite equation (5.18) as

Now, choose such that

so equation (5.20) becomes

However, we compare equations (5.22) and (5.17) and arise at a contradiction! As such, we conclude

However, also note that as  in equation (5.23), we arrive at
in equation (5.23), we arrive at

as desired. To prove the same argument for the minimum, we instead choose  . Also, then, note that
. Also, then, note that  , so we have
, so we have  . However, we then have
. However, we then have  , which must then be strictly negative according to equation (5.22). Thus, we arrive at a contradiction and the result follows. For a more detailed proof, see16,17.
, which must then be strictly negative according to equation (5.22). Thus, we arrive at a contradiction and the result follows. For a more detailed proof, see16,17.
Uniqueness of Minimal Graphs
Lemma 5.1. Let the functions  and
and  satisfy the Minimal Graph Equation, with the function
satisfy the Minimal Graph Equation, with the function  . Then,
. Then,
![\[\text{div}(A\nabla w) = 0\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-570bc671284a1c1eca6ba2c55a3e368d_l3.png "Rendered by QuickLaTeX.com")
for some symmetric matrix  in the form of equation (5.12).
in the form of equation (5.12).
Proof. Define a map  such that
such that

Then, since and  are both minimal surfaces, we therefore have that
are both minimal surfaces, we therefore have that  . Now, consider
. Now, consider

where A is defined as the matrix

Therefore, according to equations (5.26) and (5.27), we have

Now it suffices to show that is positive definite. To do so, we will prove that  is positive definite. Let
is positive definite. Let  where
where

Then, we compute  as
as
Therefore, by equation (5.30), we calculate as

However, from equation (5.31), we have

and

By equations (5.32) and (5.33), it therefore follows that is positive definite. However, by equation (5.27), it also implies that A is positive definite. The integral in a strictly positive region of a positive definite matrix is also a positive definite matrix; for a brief proof, consider  . Thus, our desired result immediately follows from equation (5.28).
. Thus, our desired result immediately follows from equation (5.28).
With Lemma (5.1) proven, we can move on to the proof for the uniqueness of minimal graphs, the main result of this section.
Theorem 5.3 (Uniqueness of Minimal Graphs). Let be a bounded domain and curve in the form of equation (5.9). If is a minimal graph in the form of equation (5.10), then is unique.
Proof. Let and be minimal graphs with corresponding functions  and
and  , respectively. Then, define a function
, respectively. Then, define a function  . By Lemma (5.1), we have
. By Lemma (5.1), we have

for some positive definite matrix ![A(x,y)=[a_{ij}(x,y)]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-0f594805838e0eecd921cb7136f86748_l3.png "Rendered by QuickLaTeX.com") . Expanding equation (5.34), we find
. Expanding equation (5.34), we find

where  and
and  . However, observe now from equation (5.35) that
. However, observe now from equation (5.35) that  , where is in the form of equation (5.11). Note here that the maximum principle invoked actually requires uniform ellipticity, a property which the minimal graph equation satisfies. On the compact domain in consideration, the gradient is bounded, ensuring uniform ellipticity. See18 for more.
, where is in the form of equation (5.11). Note here that the maximum principle invoked actually requires uniform ellipticity, a property which the minimal graph equation satisfies. On the compact domain in consideration, the gradient is bounded, ensuring uniform ellipticity. See18 for more.
Thus, according to Theorem (5.2), we have

But  , so
, so  for all
for all  . Therefore, according to equation (5.36), we find
. Therefore, according to equation (5.36), we find

Hence, by equation (5.37), it follows that  , so
, so  , and thus
, and thus  .
.
Note, however, that Theorem (5.3) only proves the uniqueness of minimal graphs and not the existence. For proof of existence in , see19. Nevertheless, for minimal planar graphs, we have that uniqueness and existence hold, according to Corollary (5.1).
Corollary 5.1 (Uniqueness of Minimal Planar Graphs). If  is a planar curve bounding a convex domain, then the associated minimal graph M lies in the same plane; i.e., only the trivial, planar solution for M exists.
is a planar curve bounding a convex domain, then the associated minimal graph M lies in the same plane; i.e., only the trivial, planar solution for M exists.
Proof. Suppose lies entirely in plane  , such that P is of the form
, such that P is of the form
![\[P = \{ (x,y,z)\in\Omega | ax+by+cz=d \}\]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-c0b2ed34ae10d6e3e4fe630916e3b8d4_l3.png "Rendered by QuickLaTeX.com")
for arbitrary coefficients  , and . Then, we have that a function
, and . Then, we have that a function  lies entirely in
lies entirely in  for certain
for certain  , and . Let correspond to the minimal surface given in the form of equation (5.10). Then we test if satisfies the Minimal Graph Equation:
, and . Let correspond to the minimal surface given in the form of equation (5.10). Then we test if satisfies the Minimal Graph Equation:

Thus, by equation (5.38), M is a minimal graph. However, by Theorem (5.3), it follows that M is unique. Therefore, the only minimal planar graph is the trivial solution where  .
.
Acknowledgments
The author would like to express sincere appreciation to his mentor Dr. Tz-Kiu Aaron Chow for presenting this research topic and motivation behind the proofs, guiding the overall research process, and settling any confusion in the abundance of questions regarding the subject.
References
- B. Lawson, Lectures on Minimal Submanifolds, Monografias de Matema´tica, No. 14, In-stituto de Matem´atica Pura e Aplicada (IMPA), Rio de Janeiro, 1973, https://impa.br/ wp-content/uploads/2017/04/Mon_14.pdf. [↩]
- F. Schwartz, Existence of outermost apparent horizons with product of spheres topology, Communications in Analysis and Geometry. Vol. 16, pg. 799–817, 2008. https://arxiv.org/abs/0704.2403. [↩]
- P.W. Bates, G.W. Wei, and S. Zhao, Minimal Molecular Surfaces and Their Applications, J. Comput. Chem. Vol.29, pg. 380–391, 2008, https://doi.org/10.1002/jcc.20796. [↩]
- M. Emmer, Minimal Surfaces and Architecture: New Forms, Nexus Network Journal. Vol. 15(2), 2012, https://core.ac.uk/download/pdf/204352959.pdf. [↩] [↩]
- M. Ito and T. Sato, In-situ observation of a soap film catenoid: A simple educational physics experiment, Eur. J. Phys. Vol. 31, no. 2, pg. 357–365, 2010. https://arxiv.org/pdf/0711.3256 [↩]
- R. E. Goldstein, A. I. Pesci, C. Raufaste, and J. D. Shemilt, Geometry of catenoidal soap film collapse induced by boundary deformation, Phys. Rev. E. Vol. 104, 035105, 2021, https://journals.aps.org/pre/pdf/10.1103/PhysRevE.104.035105. [↩]
- M. P. do Carmo, Differential Geometry of Curves and Surfaces, Prentice-Hall, Englewood Cliffs, NJ, 1976. [↩] [↩] [↩]
- M. Shiffman, On surfaces of stationary area bounded by two circles, or convex curves, in parallel planes, Ann. of Math. Vol. 63, pg. 77–90, 1956. https://www.jstor.org/stable/1969991 [↩]
- R. Schoen, Uniqueness, Symmetry, and Embeddedness of Minimal Surfaces, J. Differential Geom. Vol. 18, pg. 791–809, 1983. https://math.jhu.edu/~js/Math748/schoen.symmetry.pdf. [↩]
- M. Ito and T. Sato, In-situ observation of a soap film catenoid: A simple educational physics experiment, Eur. J. Phys. Vol. 31, no. 2, pg. 357–365, 2010. https://arxiv.org/pdf/0711.3256 [↩]
- R. E. Goldstein, A. I. Pesci, C. Raufaste, and J. D. Shemilt, Geometry of catenoidal soap film collapse induced by boundary deformation, Phys. Rev. E Vol. 104, 035105, 2021. [↩]
- J. Eggers and T. F. Dupont, Stability and Oscillations of a Catenoid Soap Film, American Journal of Physics. Vol. 49(4), pg. 334-343, 1981. https://jfuchs.hotell.kau.se/kurs/amek/prst/15_sofi.pdf [↩]
- S. Akbari, J.M. Hill, and F. van de Ven, Catenoid Stability with a Free Contact Line, SIAM Journal on Applied Mathematics. Vol. 75, pg. 2110-2127, 2015. https://doi.org/10.1137/151004677 [↩]
- P. Pucci and J. Serrin, The strong maximum principle revisited, J. Differential Equations. Vol. 196, pg.1–66, 2004. https://pucci.sites.dmi.unipg.it/lavori/grado.pdf [↩]
- T. H. Colding and W. P. Minicozzi II, A Course in Minimal Surfaces, Graduate Studies in Mathematics, Vol. 121, American Mathematical Society, Providence, RI, 2011. [↩]
- P. Pucci and J. Serrin, The strong maximum principle revisited, J. Differential Equations. Vol. 196, pg.1–66, 2004. https://pucci.sites.dmi.unipg.it/lavori/grado.pdf. [↩]
- T. H. Colding and W. P. Minicozzi II, A Course in Minimal Surfaces, Graduate Studies in Mathematics, Vol. 121, American Mathematical Society, Providence, RI, 2011. [↩]
- D. Gilbarg and N. S. Trudinger, Elliptic Partial Differential Equations of Second Order, 2nd ed., Springer, Berlin, 2001 [↩]
- H. Jenkins and J. Serrin, The Dirichlet problem for the minimal surface equation in higher dimensions, J. Reine Angew. Math. Vol. 229, pg. 170–187, 1968. https://eudml.org/doc/150841. [↩]



{kind=link}