
Abstract
While a recent growth in autonomous vehicles may suggest a shift to green energy, these vehicles largely fail to prioritize efficient path planning and energy usage. In this study, we look at path planning algorithms utilizing different heuristics to quantify an energy proxy cost for various paths. We provide different environments to our autonomous vehicle using real-life and simulated LiDAR scans and construct cost criteria to select the path that best minimizes relative energy consumption. Utilizing Dijkstra and A* path planning algorithms, two commonly used algorithms in autonomous path planning, different paths were created by minimizing energy efficiency heuristics. To test the generated paths, we constructed our own model autonomous vehicle with a built-in LiDAR which was used to run paths and map different environments. The data was then collected, placed into several tables and analyzed to find the most efficient balance of time and energy efficiency when creating our cost criteria equation. We found that our energy-optimized path planning algorithms reduced the measured electrical energy consumption by 11–19% across our tested environments (mean = 15.2% ± 3.4%) without requiring large additional amounts of computing time and travel time. Implementing energy optimized heuristics in path planning algorithms can lead to energy efficient savings that are worth incorporating into future autonomous vehicle research, making it a worthwhile early step to ensuring that a shift to green autonomous vehicles can maximize its environmental benefits and work more effectively.
Keywords: LiDAR mapping, Heuristic optimization, Eco Routing, Autonomous path planning, Computational sustainability
Introduction
The past few years have witnessed the introduction of autonomous vehicles, with autonomous cars like Waymo increasing its scale by over 76% in California just last year. While large scale electrification has contributed to some reductions in transportation emissions, current autonomous vehicles are not optimized to maximize energy efficiency and minimize carbon output. This gap remains especially important as the transportation sector is one of the world’s largest contributors to greenhouse gases, and even marginal improvement can create huge leaps in emissions reduction when put to scale. The primary objective of this study was to modify existing algorithms used in autonomous vehicles with a cost criteria equation which would allow planned paths to maximize their energy efficiency under controlled experimental conditions.
Currently, the integration of LiDAR technology into autonomous vehicles has significantly advanced their ability to visualize and navigate complex and moving environments while being able to plan paths with large increases in precision. However, existing path planning algorithms primarily focus on only optimizing for shorter distances while neglecting energy consumption considerations. Recent studies have highlighted the importance of optimizing path planning for energy efficiency to enhance positive environmental impacts and bolster sustainability. Research has shown that optimizing path planning can improve energy usage up to 10.36% compared to traditional methods1. Moreover, the development of cost functions that account for factors like inclines and turns has been named as a promising approach to address energy inefficiencies in autonomous vehicles2.
Furthermore, research from Verma and Kumar highlights the computational adaptability of popular path planning algorithms like A* and Dijkstra suggesting that additional heuristics in path planning are very feasible on a larger scale3. Despite all these advancements, there is still a lack of a comprehensive framework on the integration of LiDAR based path planning with energy efficient heuristics. This study aims to address this research gap by testing various heuristics and implementations that can help address energy efficiency without compromising feasibility in small-scale experimental systems.
To address this challenge, we looked at path planning algorithms, the decision-making process in which autonomous vehicles build their routes, which we found was the most direct way to address energy efficiency. Using the two most common path planning algorithms in autonomous vehicle navigation, Dijkstra and A*, we built a system to compare the shortest path to a path with heuristics added to optimize for energy efficiency. Using LiDAR scans taken from a scale replica of a Tesla Model Y and simulated LiDAR scans, we were able to create different terrains and circumstances for the algorithms to map through and develop a thorough understanding of the best path implementations to reduce energy consumption.
We chose to use path planning as the focus of this study as it’s a substantial way of energy conservation, enabling the usage of heuristics including incline and turn minimization which we chose as the major important energy conservation factors. While these results cannot be directly scaled to real-world autonomous vehicles, optimized path planning demonstrates measurable benefits within controlled environments.
Limitations
This study did come with several limitations. First, while our simulation system and 1:20 scale model allowed for highly controlled testing, full-scale autonomous vehicles contain significantly more complex dynamics, including battery discharge rates, regenerative braking, varying tire pressures, air resistance, weather effects, and real-world traffic conditions. Additionally, our energy cost function does simplify energy usage into inclines and turns, ignoring factors such as acceleration/deceleration cycles, regenerative braking, and vehicle load. Future studies should attempt to collect and analyze detailed energy consumption data across larger scales, incorporate full vehicle models, and validate cost functions with high-frequency motor and battery measurements. Finally, our test environments included largely static obstacles, while autonomous vehicles must be able to recognize and adapt to dynamic changes, including moving obstacles, pedestrian behavior, and varying terrain.
Methods
The structure of this study included 4 main steps. First, we constructed a physical scale replica of a Tesla Model Y from scratch, powered by a raspberry pi. We then used boxes and other real-world objects as well as python programs to create real-life and simulated environments to test programs. Next, we experimented with two path planning algorithms, A* and Dijkstra, to determine the effects of implemented heuristics on energy consumption proxies while creating a cost criteria equation in the process to determine the most efficient path. Finally, data was collected, organized and reviewed to understand the feasibility of implementing these programs in future autonomous vehicle research without additional inconveniences.
Model Vehicle Construction and Lidar Integration
To ensure realistic conditions and maintain control while testing our path planning algorithms, we constructed a 1:20 scale model of a Tesla Model Y (weighing 22.4 lbs.) with a Raspberry Pi processing unit and LiDARs integrated on the roof. The car’s motions were controlled via two DC motors operated through an Arduino. The model’s shell and mounts were all modeled in Fusion 360 and 3D printed using regular PLA filament. The car utilizes 1000aMH Adafruit lithium-ion batteries with a runtime of roughly 10 hours. This model vehicle served as a scale representation for autonomous cars while providing us with additional flexibility to test algorithms and conditions in constrained environments both indoor and outdoor. The model’s integrated LiDAR system spins continuously to properly map the surrounding environment and generate 2D planar range data which is sent to the car’s processing unit for occupancy grid mapping and path generation. To create diversified testing scenarios, we used real data from the LiDAR scans as well as scans of a 50×80 feet simulated environment. We chose to utilize an RPLidar model for this study due to its reliability in detailed planar mapping, as any undetected obstacles would alter path planning algorithms and derail the accuracy of the study.
Note that scaling results from a small model vehicle to full-sized autonomous cars is not straightforward. Many physical factors including wind resistance, tire-road friction, vehicle inertia, and battery efficiency scale nonlinearly with size. As a result, energy costs observed in our model car may not always translate linearly to real vehicles, and the quantitative trends we observe should be interpreted in context and as preliminary demonstrations rather than as exact predictions for full-scale systems.
Environment Construction and Terrain Simulation
To evaluate the performance and results of the various implemented path planning algorithms, we scanned and simulated a variety of environments with varying factors including obstacle size and density, inclines, and path curvature. To simulate real world scenarios, the test environment included ramps, barriers, boxes and more materials to simulate the primary conditions that affect energy usage such as steep slopes and frequent/unnecessary turns. Additionally, the simulated environments were generated from artificial LiDAR scans allowing for an increased range of testing conditions and more reproducibility with tests. Using both physical and simulated scans provided for a more holistic view of the conditions most impactful to energy usage and presented a much more comprehensive understanding of path planning performance and necessary adjustments.
The largest physical test environment we designed was 50×80 feet, which does not reflect full-scale urban or highway driving. Consequently, traffic, pedestrians, variable road surfaces, and other factors were not modeled. These factors limit the real-world applicability of our findings, highlighting the need for further testing on full-scale vehicles or larger, more complex environments. Additionally, human route preferences and real-world traffic conditions could affect energy efficiency outcomes. A route optimized for minimal inclines may not always be practical if it passes through heavily populated areas, resulting in increased travel time or energy usage.
Path Planning algorithms: Dijkstra and A*
For our path planning algorithms, we chose to implement A* and Dijkstra’s, two widely used path planning algorithms in autonomous vehicle navigation. Dijkstra’s algorithm was regarded as the baseline for comparison as it consistently mapped out the shortest possible path in terms of distance or time without considering any energy related costs. The A* algorithm was then modified with our Heuristic optimization criteria to account for energy usage factors including minimizing time spent on inclines and minimizing turns. Heuristic weights were systematically tuned throughout the tests to find the best possible balance between distance and the vehicle’s energy efficiency.

Cost function development for energy efficiency
To quantify each path’s energy cost, we constructed a cost function that incorporated the various factors impacting the routes. Distance served as the baseline for our cost metric with additional turns and time spent on inclines weighted as additional penalties. Measured motor currents during test runs were used to determine that inclines increase energy usage by an approximate factor of 2-3 relative to level terrain, while frequent turns increase energy usage by a factor of 1.5–2. These values were used to assign heuristic weights in the cost function, providing an empirically grounded basis for energy penalties.
Our cost function included 3 primary variables, E, W, and C, where W represents the weight given to inclines and additional turns in relation to a straight path, C represents the total number of cells travelled along a certain stage of the path (straight, turns, inclines), and E represents the total energy usage. The total cost function for each path was calculated in the following equation:
(1) ![\[E_{\text{total}} = \left(C_{\text{distance}}\right) + \left(C_{\text{incline}} \cdot W_{\text{incline}}\right) + \left(C_{\text{turn}} \cdot W_{\text{turn}}\right) \]](https://nhsjs.com/wp-content/ql-cache/quicklatex.com-5e3e0323de7cfb1a8d33cd5b599a6fc8_l3.png "Rendered by QuickLaTeX.com")
Real energy consumption was measured by logging motor voltage and current at a 10 Hz sampling rate. Total energy was calculated as  , where
, where  is the voltage,
is the voltage,  is the current, and
is the current, and  is the period in which the tests run. This energy measurement validates the cost function as a proxy metric, allowing us to make a quantitative comparison between different paths within our experimental models.
is the period in which the tests run. This energy measurement validates the cost function as a proxy metric, allowing us to make a quantitative comparison between different paths within our experimental models.
However, our cost function does simplify real-world energy consumption by only considering distance, turns, and inclines. In actual vehicles, additional factors such as acceleration and deceleration cycles, vehicle speed, tire pressure, ambient temperature, wind resistance, car mass, battery health, and regenerative braking can significantly influence energy usage. The formula represents a proxy for energy efficiency rather than an exhaustive measurement of vehicle power consumption.
Data Collection and Performance Evaluation
For each test environment, we chose a set starting point and goal point and allowed A* and Dijkstra’s to generate their various paths. The paths were then sent to the processing unit where our algorithms evaluated them on three different criteria: total path length, energy cost, and real-world efficiency as measured by the model vehicle. LiDAR-derived occupancy maps were visualized to ensure the algorithms’ accuracy and validate object recognition and detection. We then recorded the results of the real world and simulated path runs and conducted final evaluations to verify the consistency of the algorithm’s performance. Each environment was tested with 10 repeated trials per algorithm, and results are reported as mean ± standard deviation shown in our results section.
Computational Tools and Implementation
All of the algorithms and data processing were implemented through Python programs with visualization and path planning algorithms carried out using libraries including matplotlib, NumPy, and MATLAB for 3D modeling. LiDAR data was preprocessed and used for occupancy grid mapping with the path planning algorithms being executed on grid-based maps before they were finally turned into drive commands for the vehicle to execute. This processing pipeline was designed to best replicate real world processing pipelines for autonomous vehicle path planning and control to ensure that vehicles are consistently updated and making the appropriate navigation decisions.
Results
Path Length and Cost Comparison
Both Dijkstra and A* algorithms were able to deliver feasible paths across each of the tested environments, yet there were some significant changes when the energy optimized heuristics were applied in the A* algorithm. As expected, Dijkstra’s algorithm consistently delivered the shortest possible path while the A* algorithms provided a slightly longer one with notable differences in energy evaluation.
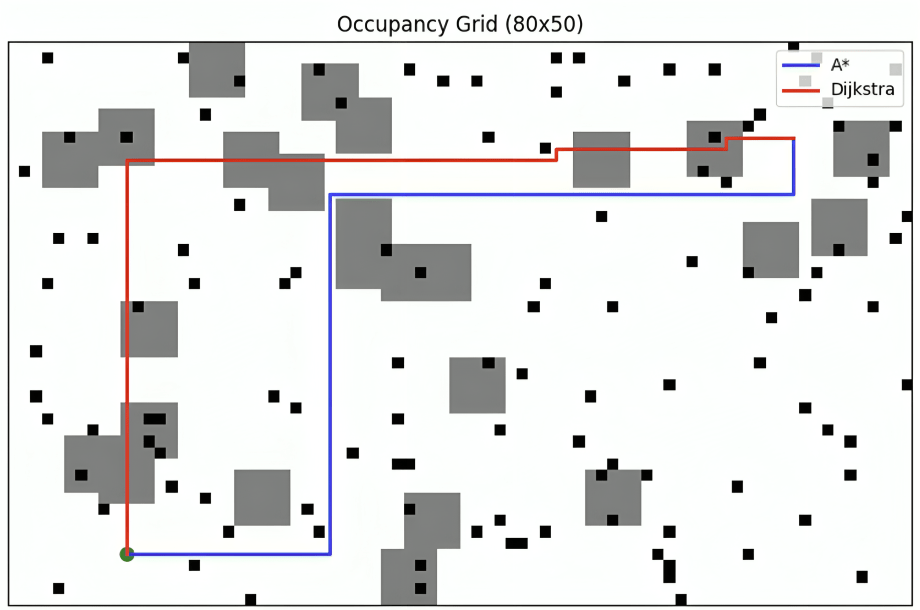
Figure 2 shows a comparison of the two algorithms’ chosen paths in a simulated terrain with larger grey squares representing inclines and smaller black squares representing obstacles. While the path solution from Dijkstra’s traversed a shorter distance, the A* path largely avoided inclines and minimized turns significantly. The trade-off resulted in a 12–18% longer path for the A* algorithm while creating an 11–19% reduction in predicted energy cost.
Real Vs Simulated Environment Results
The same trend was observed in both simulated and physical environments. The only difference was a varying magnitude. In real world tests using the scale model vehicle, the optimized A* algorithm measured a 11% ± 2% lower energy cost while simulated environments showed significantly larger reductions, measuring 19% ± 3% on average. Average energy cost was calculated by averaging the difference in energy costs between Dijkstra and A* algorithms in simulated and real terrains. The large percentage difference between simulated and real-world environments can be attributed to additional factors in real world tests including friction, air resistance, and general voltage sag or internal resistance within the real world model.
| Real & Simulated Environment Test Results | ||||
|---|---|---|---|---|
| Test | Real – Dijkstra (J) | Real – Optimized A* (J) | Simulated – Dijkstra (J) | Simulated – Optimized A* (J) |
| 1 | 102 | 90 | 104 | 80 |
| 2 | 98 | 88 | 97 | 82 |
| 3 | 100 | 89 | 99 | 81 |
| 4 | 101 | 91 | 102 | 83 |
| 5 | 99 | 88 | 98 | 79 |
| Avg | 100 | 89 | 100 | 81 |
| Std | ± 2 | ± 2 | ± 4 | ± 3 |
| Reduction (%) | — | 11% | — | 19% |
Algorithm efficiency and Practical Implications
While the optimized A* algorithm consistently provided a more energy efficient path, it did require a 12-18% increase in processing time than the Dijkstra algorithm when mapping out paths. Nevertheless, this additional time is largely negligible as both paths were consistently produced in under 1.7 milliseconds for all trials. This suggests that this form of eco routing is sustainable within small-scale experimental systems. However, in real-world scenarios, longer travel times could reduce user acceptance and increase the general wear on vehicles. Such trade-offs highlight the need to balance energy efficiency with practical considerations such as customer convenience and vehicle longevity.
Conclusion
Key Findings
This study analyzed the impacts of heuristics optimized for energy efficiency in autonomous vehicles by comparing energy usage of paths generated by different path planners. While Dijkstra’s algorithm consistently produced the shortest-distance routes, our optimized A* algorithm generated paths that reduced energy usage by 11–19% on both real and simulated environments by largely avoiding inclines and unnecessary turns. This came with minimal computational overhead as processing times remained under 1.7 milliseconds on the Raspberry Pi-based platform used in our model tests. These findings meet the primary objective of the study, providing evidence for improved energy efficiency in controlled environments when using heuristic-based path planning, supported by our cost-criteria equation.
It is also important to consider that the observed improvements in energy efficiency may result from the modified cost function rather than the algorithm itself. A* incorporates heuristic weights to account for inclines and turns, while Dijkstra is applied using a distance-only metric. Future work could isolate algorithmic performance by applying identical energy-aware edge costs across different algorithms.
Relevance to Existing Literature
Our findings align closely with the rapidly growing body of research surrounding eco-routing and energy-aware path planning, which show the significant role routing can play in vehicle energy consumption and emissions. Early research by Barth and Boriboonsomsin has shown how optimizing vehicle routing and driving behavior can substantially reduce fuel consumption and greenhouse gas emissions, particularly when road grade and driving conditions are considered4. Subsequent studies continued quantifying the impact of road grade on energy usage and consumption, demonstrating that inclines are often a dominant contributor to increased fuel and energy consumption within autonomous vehicles5.
Research on energy-efficient routing algorithms has continued to expand beyond traditional shortest-path formulations as we explored within our study. Research from Ericsson et al. has shown that shortest-distance routes are largely suboptimal when fuel consumption is considered, which motivates the use of energy efficient path planning thorough multi-objective cost function6. Additionally, Pourazarm et al. showed how incorporating energy consumption into vehicle routing and path planning can contribute to significant reductions in overall energy usage without egregious additional computational costs7. Research by Artmeier et al. extends this concept to electric vehicles, demonstrating that energy-optimal routing often deviates from the shortest path due to terrain and vehicle efficiency constraints providing evidence that the average shortest possible path does not necessarily minimize energy inefficiencies8.
From an algorithmic viewpoint, the main theoretical foundations of heuristic-based path planning have been established on a broader scale. The A* algorithm, which was popularized by Hart et al., has provided a framework for incorporating heuristic constraints into shortest-path search while still maintaining an optimal path9. Later studies have shown that A* and Dijkstra’s algorithm, the two path planning algorithms we focus on in our study, have primarily differed in their efficiency searching for paths but not the quality of their solutions when operating under the same cost functions3. This distinction supports our study’s interpretation which claims that observed energy savings largely arise from the modified cost criteria rather than from the algorithms’ structure alone.
The integration of environmental and energy efficiency-based objectives into computational decision-making has been a large focus of the growing field of computational sustainability. Gomes highlights the importance of embedding our sustainability goals directly into algorithmic frameworks to efficiently address environmental concerns and scale sustainability efforts10. Related work has proven the impact of traffic congestion, route curvature, and stop-and-go behavior on vehicle emissions, emphasizing the need for continuous optimization on the route-level11.
LiDAR-based mapping and navigation has also been researched alongside autonomous systems. Thrun et al. has established several probabilistic approaches to real-world autonomous vehicle mapping and localization to form the basis for occupancy grid navigation12. Zhang and Singh have demonstrated the effectiveness of these LiDAR-based scanning and mapping techniques for large-scale efficient navigation within structured environments13. These studies support the feasibility of using planar LiDAR data and scans to develop reliable path planning in controlled environments as we attempted to do within our study.
Finally, prior research has emphasized the multitude of trade-offs that come with the application of eco-routing. Demir et al. showed that minimizing emissions or energy consumption leads to trade-offs with shortest-path objectives, which may create conflict within complex transportation networks14. Studies on shortest time-dependent routing and vehicle dynamics highlight the need for a balance between efficiency, travel time, and user acceptance for real-world applicability15. Together, these studies have helped contextualize the results we gathered as an early experimental validation of energy-aware and efficient routing rather than a definitive real-world deployment solution with full practical applicability.
Future Directions
In alignment with our study, we suggest that future research should focus on validating eco-routing heuristics and optimized path planning in full-scale autonomous vehicles to capture real-world energy consumption. Application to modern fleet-scale or ride-sharing systems could help quantify the exact societal benefits, including emissions reduction and energy efficiency. We also encourage a focus on studying a wider variety of algorithms with diversified heuristics to isolate specific heuristic benefits and algorithm distinctions. Ultimately, eco-routing and energy-efficient path planning can help maximize the environmental benefits of the broader shift to autonomous systems and green technology.
Conclusion
This study demonstrates that implementing heuristic optimization in path planning algorithms for autonomous vehicles leads to significant improvements in energy efficiency compared to shortest-distance routing. By limiting factors such as turns and inclines, we were able to reduce energy costs by up to 19% in test environments while preventing excessive computational increases. These findings highlight the potential of eco-routing as a strategy to reduce vehicle emissions, though real-world testing is required before scaling to full-size autonomous fleets. Ultimately, the optimization of path planning to prioritize energy efficiency contributes to smarter, more environmentally sustainable autonomous vehicle systems.
References
- C. Liu, J. Wang, W. Cai, Y. Zhang. An energy-efficient dynamic route optimization algorithm for connected and automated vehicles using velocity-space-time networks. IEEE Access. 7, 108866–108877 (2019). [↩]
- D. Georgiadis, K. Karathanasopoulou, C. Bardaki, I. Panagiotopoulos, I. Vondikakis, T. Paktitis, G. Dimitrakopoulos. Performance analysis of energy-efficient path planning for sustainable transportation. Sustainability. 16, 4963 (2024). [↩]
- G. Verma, A. Kumar. Algorithmic pathfinding: comparing Dijkstra’s and A* algorithms in complex grid environment. International Journal of Engineering Research and Development. 20, 70–79 (2024). [↩] [↩]
- M. J. Barth, K. Boriboonsomsin. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transportation Research Part D: Transport and Environment. 14, 400–410, (2009). [↩]
- K. Boriboonsomsin, M. Barth. Impacts of road grade on fuel consumption and carbon dioxide emissions evidenced by use of advanced navigation systems. Transportation Research Record. 2139, 21–30 (2009). [↩]
- E. Ericsson, H. Larsson, K. Brundell-Freij. Optimizing route choice for lowest fuel consumption – potential effects of a new driver support tool. Transportation Research Part C: Emerging Technologies. 14(6), 369–383 (2006). [↩]
- S. Pourazarm, J. Auld, V. Sokolov, A. Mohammadian. Vehicle routing and scheduling for energy consumption minimization. Transportation Research Record. 2572, 58–67 (2016). [↩]
- A. Artmeier, J. Haselmayr, M. Leucker, M. Sachenbacher. The shortest path problem revisited: Optimal routing for electric vehicles. KI – Künstliche Intelligenz. 24, 245–252 (2010). [↩]
- P. Hart, N. Nilsson, B. Raphael. A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics. 4, 100–107 (1968). [↩]
- C. P. Gomes. Computational sustainability: computational methods for a sustainable environment, economy, and society. The Bridge. 39, 5–13 (2009). [↩]
- A. M. Stathopoulos, L. Ntziachristos, Z. Samaras. Impact of traffic congestion on vehicle emissions. Transportation Research Part D: Transport and Environment. 9, 413–427 (2004). [↩]
- S. Thrun, W. Burgard, D. Fox. Probabilistic Robotics. MIT Press (2005). [↩]
- J. Zhang, S. Singh. Visual-lidar odometry and mapping: Low-drift, robust, and fast. IEEE International Conference on Robotics and Automation. 2174–2181 (2015). [↩]
- E. Demir, T. Bektas, G. Laporte. An adaptive large neighborhood search heuristic for the pollution-routing problem. European Journal of Operational Research. 223, 346–359 (2012). [↩]
- J. R. Rice, R. L. Smith. Shortest paths in transportation networks with time-dependent costs. Transportation Science. 18, 295–312 (1984). [↩]



{kind=link}