
Abstract
This perspective article analyzes the current advancements and investigations within the field of autonomous underwater swarm robots, exploring the research question: To what extent can autonomous underwater swarm robots assist in protecting and maintaining aquatic environments? The paper investigates this research question by discussing recent research results in three elements that are essential to swarm robotics: movement, sensing, and communication. Specifically, the reviewed communication methods include WiFi transmitters and blue lasers, sensing methods include image recognition and acoustic sonars, and movement methods include single-propellers, quadra-propellers, and bio-inspired fin propellers. The paper also reviews currently existing underwater swarm robotics projects by analyzing their potential to contribute towards environmental protection. Results from the comparison of selected studies of movement, sensing, and communication suggest a clear choice for all three elements that most effectively achieves environmental protection tasks. Quadra-propellers are optimal for movement due to their high agility and efficiency. Image recognition is best for sensing to recognize the identity of surrounding objects. Blue lasers provide the most effective communication due to their high bandwidth and minimal absorption by water. The existing swarm robotics projects are also evaluated based on their feasibility to be applied in real-world contexts, where the key obstacles found are the lack of evidence for the swarm’s scalability and adaptability to various water conditions. Upon providing a background overview of the field, new extensions and ideas are proposed for future research directions in movement, sensing, communication, and applied projects, along with their opportunities for further improvement by merging existing research in new ways.
Keywords: Swarm Robotics, Autonomous Robots, Sustainability, Underwater Robotics, Movement, Communication, Sensing
Introduction
Justification of Topic
In the rapidly industrializing societies today, countless bodies of water are polluted heavily with trash disposed of by humans. One of the most critical threats to aquatic life today is plastic debris. Plastics constitute 60%-80% of the marine debris globally, which not only pollutes aquatic ecosystems but also kills or severely harms life underwater, threatening the extinction of animals1. Another pollution source is chemicals from human activity, including metals from industrial processes and pesticides from agriculture, which can damage all layers of underwater food chains2. Rising carbon dioxide levels in recent years have also led to increased ocean acidification, altering geochemical cycles and impeding the shell formation of aquatic animals3. The field of swarm robotics offers promising solutions in combating the current environmental degradation. Because of the large space aquatic ecosystems usually occupy, swarm robots can achieve tasks much faster than a single robot. To address the problem of plastic pollution, robots can be designed to clean up underwater waste through claws or nets, preventing the trash from contaminating aquatic ecosystems. While swarm robots alone cannot fix problems with chemical pollution or acidification in water, they nevertheless can assist in environmental protection by monitoring water quality or other more indirect methods.
Movement, sensing, and communication are chosen as the three comparative axes for underwater swarm robotics, as they represent the most important features that swarms need to protect the environment effectively. Robots in a swarm must be able to move in their underwater environments to interact with the rest of the swarm and move between locations, given the large volume of space in typical bodies of water. Furthermore, sensing is required for the robot to navigate unfamiliar environments and respond accordingly, especially for collecting plastic debris underwater. Lastly, communication between robots allows the swarm to achieve complex swarm patterns from the simple movements and decisions of individual agents, a key advantage of swarm robots over individual robots4.
Prior Research—Movement
Movement is a key point of consideration in swarm robotics, especially under water. Robots need to adjust their location so they can interact with new areas of water or approach pieces of trash for collection. Movement also depletes a significant portion of the stored energy in a robot and thus influences the maximum operating lifespan of a robot swarm. Therefore, the methods used to achieve movement will be compared based on their energy efficiency and agility.
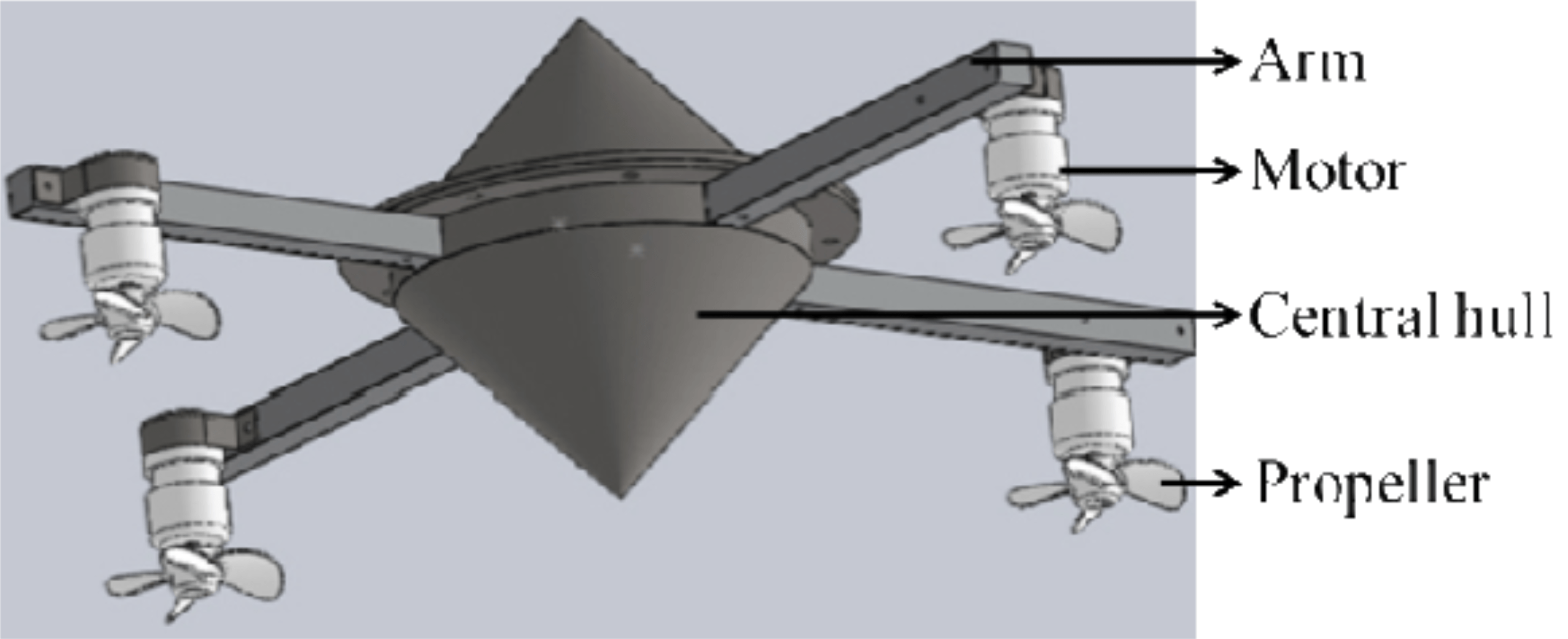
A research project led by Thiyagarajan Ranganathan explored and analyzed the properties of a quadra-propeller robot underwater using simulations. The design was intended to enhance the maneuvering capabilities of underwater robots, which were often insufficient using conventional propeller designs. The robot design was named AQUAD and had 4 degrees of freedom: row, pitch, yaw, and heave, which are achieved by adjusting the rotational speeds of the four propellers, allowing for high flexibility of underwater movement. A simulation was implemented with the Newton-Euler approach to test the robot, measuring its torque and speed over time and its ability to adjust its tilting angles5.
Other forms of movement include single-propeller robots and bio-inspired robots, which are robots based on the swimming movement of animals. These two methods were explored and compared in terms of power and thrust in a study by John Palmisano6.
Prior Research—Sensing
Sensing is also important in cleaning up and protecting aquatic ecosystems. Robots must detect the environment around them and act accordingly. This is especially important in recognizing and collecting debris underwater. However, one challenge in underwater swarms is that water weakens most sensing methods, limiting their effective distance7. As a result, the sensing capabilities can be best judged by their detection accuracy and sensing distance underwater.
To solve this, Guo-Jia Hou led research on an image recognition model that uses color absorption data and shape features to recognize objects underwater. Since many water mediums are somewhat transparent, visible light can pass through and be used for sensing at short distances. The study used photos of a targeted object in a water tub, from which the image was then processed and extracted from its surrounding environment. Background noise and color differences had to be accounted for to enhance accuracy. An algorithm is used to pick up features on the target object’s shape, which allows the camera to recognize the object’s shape, such as a circle, hexagon, or ellipse8.
Alternatively, sensing could be done using an underwater sonar, as it travels relatively quickly and can move in all directions. The properties of sonars were modeled and measured in research led by Filip Mandić and showed some successful results9.
Prior Research—Communication
In swarm robotics, communication is essential in allowing effective collaboration and optimal performance. However, like sensing, communication methods are also severely obstructed by water as a medium and are limited by an effective distance, obstructing information from traveling quickly7. Because of this, communication methods can also be judged by their transmission distance and the rate of information delivery10.
One solution to this problem is presented in an investigation led by Chao Shen, which proposes a blue laser to transmit information underwater. Blue was chosen as it is absorbed the least of all visible light colors in water. The light transmission only required a power of 51.3 milliwatts, which is beneficial in maintaining the operating lifespan of swarm robots underwater. Because of the high frequency of light compared to sound, the lasers have a relatively high bandwidth and can efficiently transfer large amounts of information11.
Another less effective approach in communication transmission is to use WIFI signals underwater, which oscillate at a frequency of 2.4 GHz. Matthew Joordens tried to implement such communication methods but failed due to water absorption12.
Existing Swarm Robot Projects
Several research groups have already assembled aquatic swarm robots to help in environmental protection. These swarm robots have proven to be able to contribute either directly or indirectly to environmental protection of aquatic ecosystems.
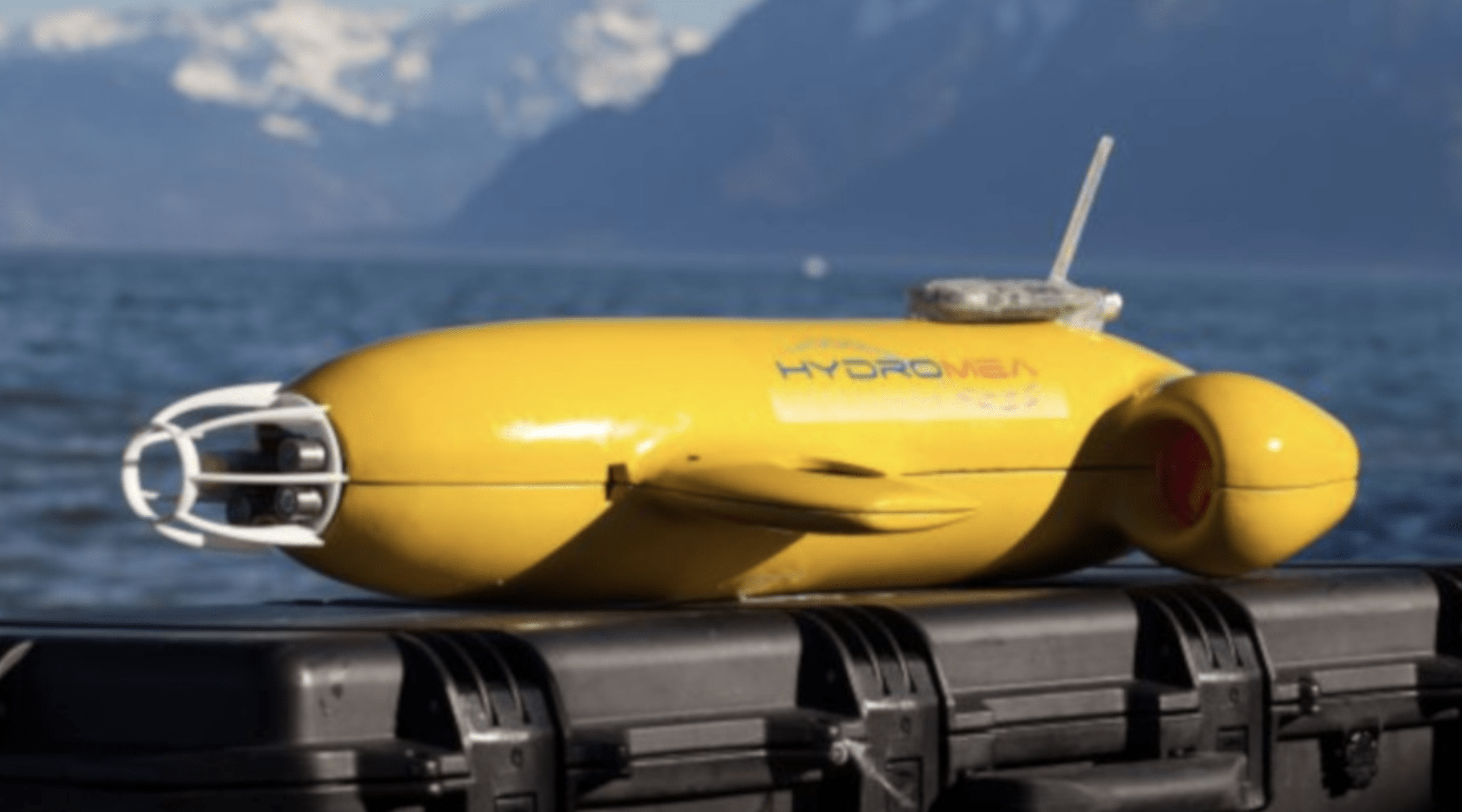
For instance, Felix Schill led the development of a robot swarm, called the Vertex, which aimed to achieve convenient, cost-efficient environmental monitoring. The Vertex is small and can be carried with one hand, allowing for easy deployment. These robots operate not with absolute location but with relative distances between robots. This ensures the robots remain spread out to maximize efficiency. The robot swarm testing was limited to a group of 5-10 robots, as the acoustic sensors limit its scalability. The swarm mechanisms were first tested in a computer simulation using a hardware-in-the-loop testing framework before being deployed in a dive on Lake Onego. These robots will most likely be used in monitoring the water quality in various lakes, rivers, or oceans, which allows for the regulation of these bodies of water to identify when further action is needed to protect these ecosystems13.
While sensing underwater environments is helpful, there are many other methods by which swarm robotics can assist in environmental protection. The CoCoRo project by Thomas Schmickl, for example, is a swarm that can not only monitor water but also search for sunken objects. The swarm consists of 41 robots and is a heterogeneous group, meaning the robots have distinct roles in operation. A base station holds and computes the information gathered by the swarm. Ground-swarm robots search for targets underwater, while relay-swarm robots transfer information between the ground swarm and the base station. The robots are not controlled by a central base but rather make local, autonomous decisions. In addition to environmental monitoring, the CoCoRo swarm can be applied in search missions that help protect the environment. For instance, if an oil leakage occurs under oceans, the robot swarm can work together to quickly identify the location of the leak to hasten repairs and minimize pollution14.
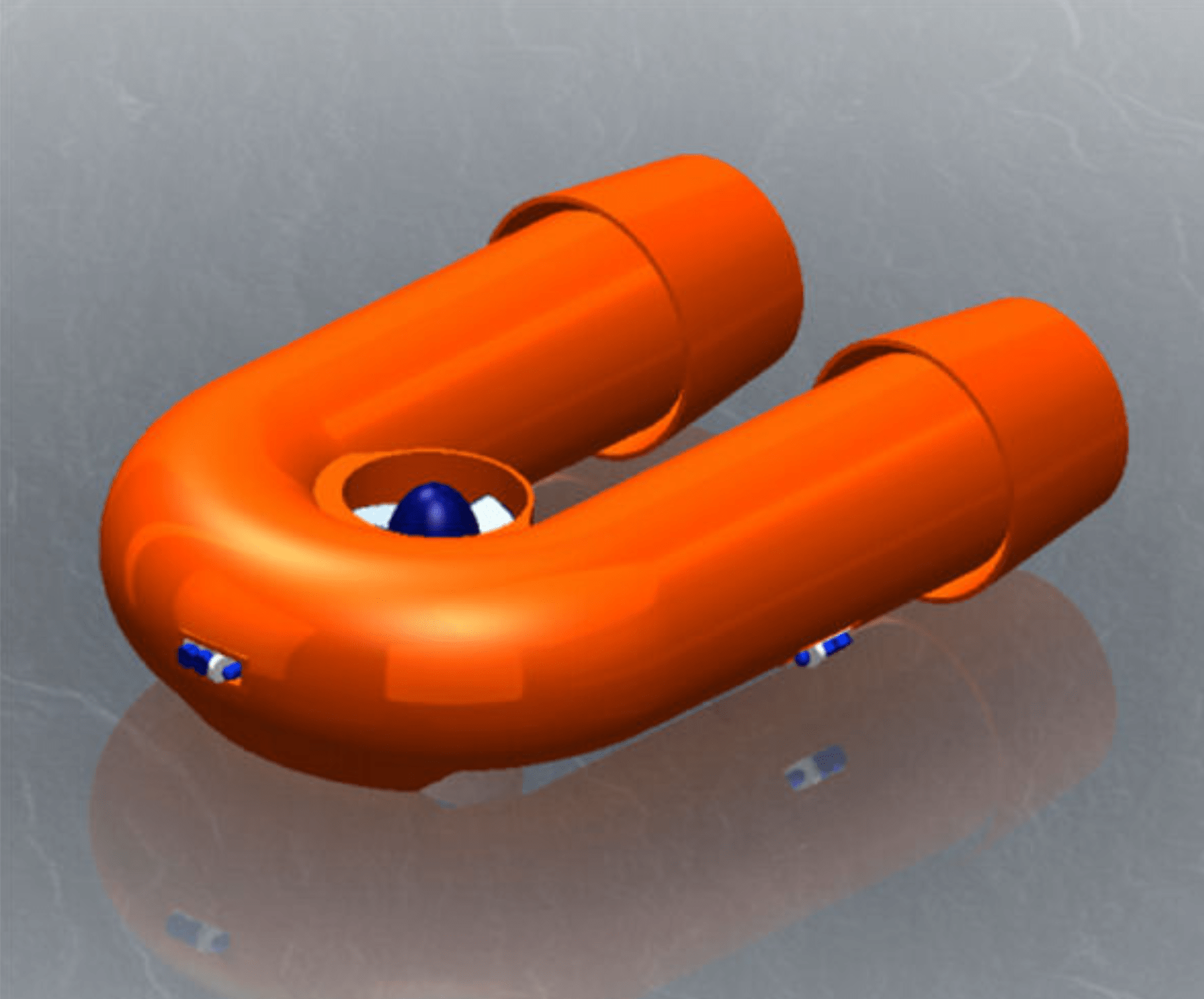
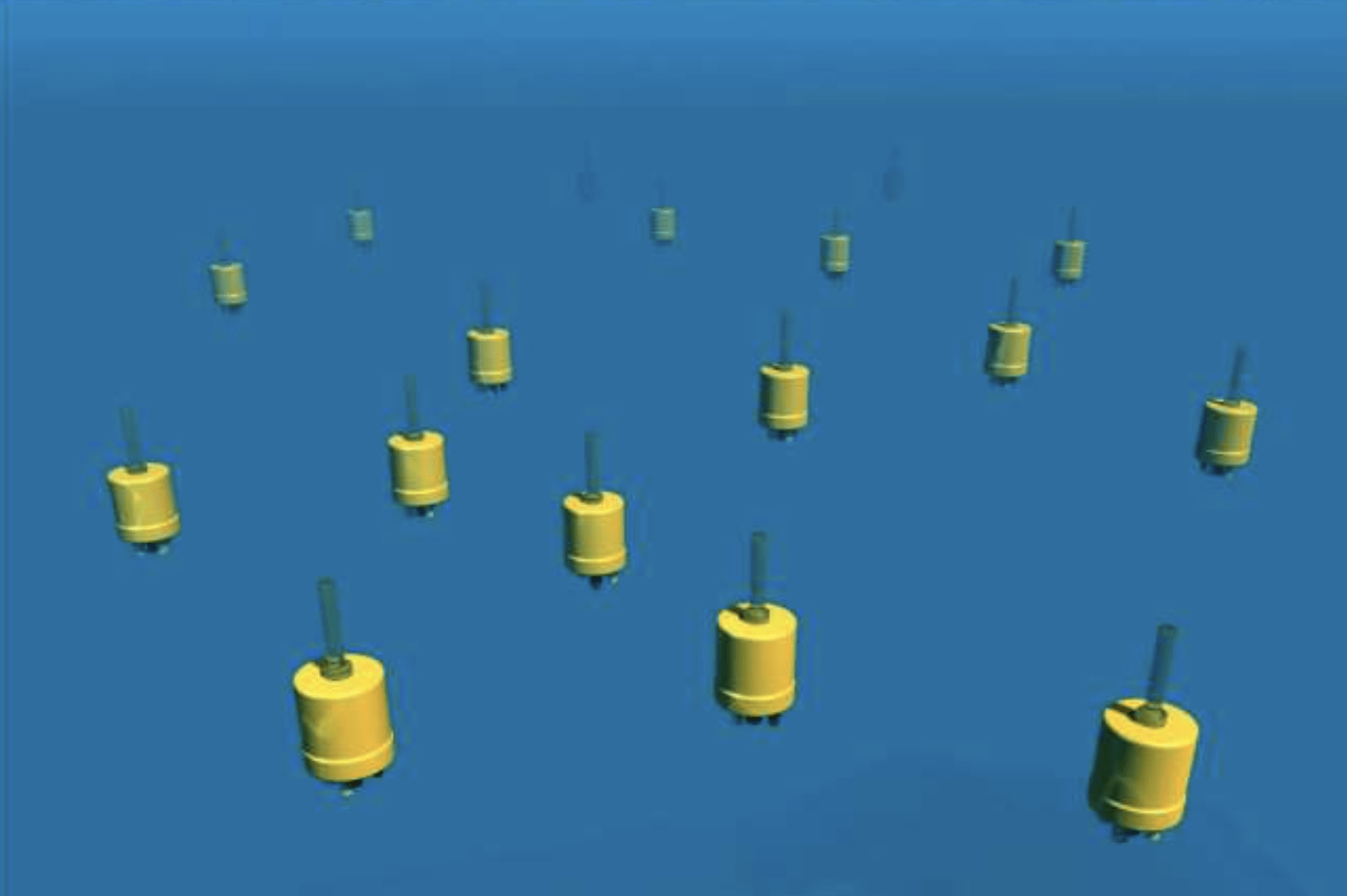
Swarm robots can also assist in aquatic protection through more indirect methods, such as modeling ocean dynamics. Jules Jaffe created miniature robots to measure ocean currents at the submesoscale, which is between 1 and 10 kilometers in size. These robots were named the Mini-Autonomous Underwater Explorer, or M-AUE. The M-AUE operates as 16 individual agents that move underwater and are tracked continuously, which are used to compute how ocean water flows. These robots move by mimicking the vertical swimming behavior of plankton and thus apply biomimicry to achieve underwater motion. These robots were deployed and tested in the ocean to measure currents and compute water trajectories. A possible application of this swarm robot in the field of environmental protection is to apply the wave dynamics and ocean current models to determine how trash, such as plastic debris, would flow when disposed of in water. This can allow the measurements to predict the locations of ocean trash, which can then help expedite trash removal from the ocean, minimizing its harm15.
Methodology
Search Strategy
This is a literature synthesis of the current peer-reviewed articles published that are related to underwater swarm robots, including research on key components of underwater swarm robots and swarm robot deployment projects. Articles were found using the search engine Google Scholar, and key search terms included “Swarm robotics,” “Autonomous,” “Underwater,” and “Environment.” The research on the essential components of swarm robots was found using the search terms “Underwater movement,” “Underwater sensing,” and “Underwater communication.” The main sources found through this strategy include publications in IEEE conferences and robotics journals. Inclusion criteria for the research articles included that they must be from peer-reviewed sources to ensure credibility. Furthermore, the articles must also be published within the last 2 decades to ensure the relevance of their findings. After these criteria had been applied, key sources were then selected based on whether they could contribute to environmental protection and sustainability to match this review paper’s research questions. Resulting sources from the search and selection were analyzed and categorized thematically into the subtopics that they were linked to in this review article to discuss. The following sections of Methodology describe the methodology used in the key sources of this review article.
Movement, Sensing, and Communication
The studies on Quadra-propeller, image recognition, and laser communication described above have all attempted to validate the effectiveness of their designs. The methods they used will be explained below. Ranganathan’s analysis of the Quadra-propeller applied simulations and the model of the robot’s force and torque, were developed with a Newton-Euler approach. Design parameters were set for the robot, including a weight of 5.7 kg and an arm length of 30 cm. The robot was assumed to have a cone-shaped central body to simplify drag forces, as shown in the CAD model in Figure 2. Furthermore, the thrust generated by the motors was assumed to be proportional to the angular frequency squared to estimate the forces and torque. The methodology demonstrates the cost-effectiveness and simplicity of measuring by means of simulations. However, the simplifications and assumptions reveal the limitations of simulated tests as well5.
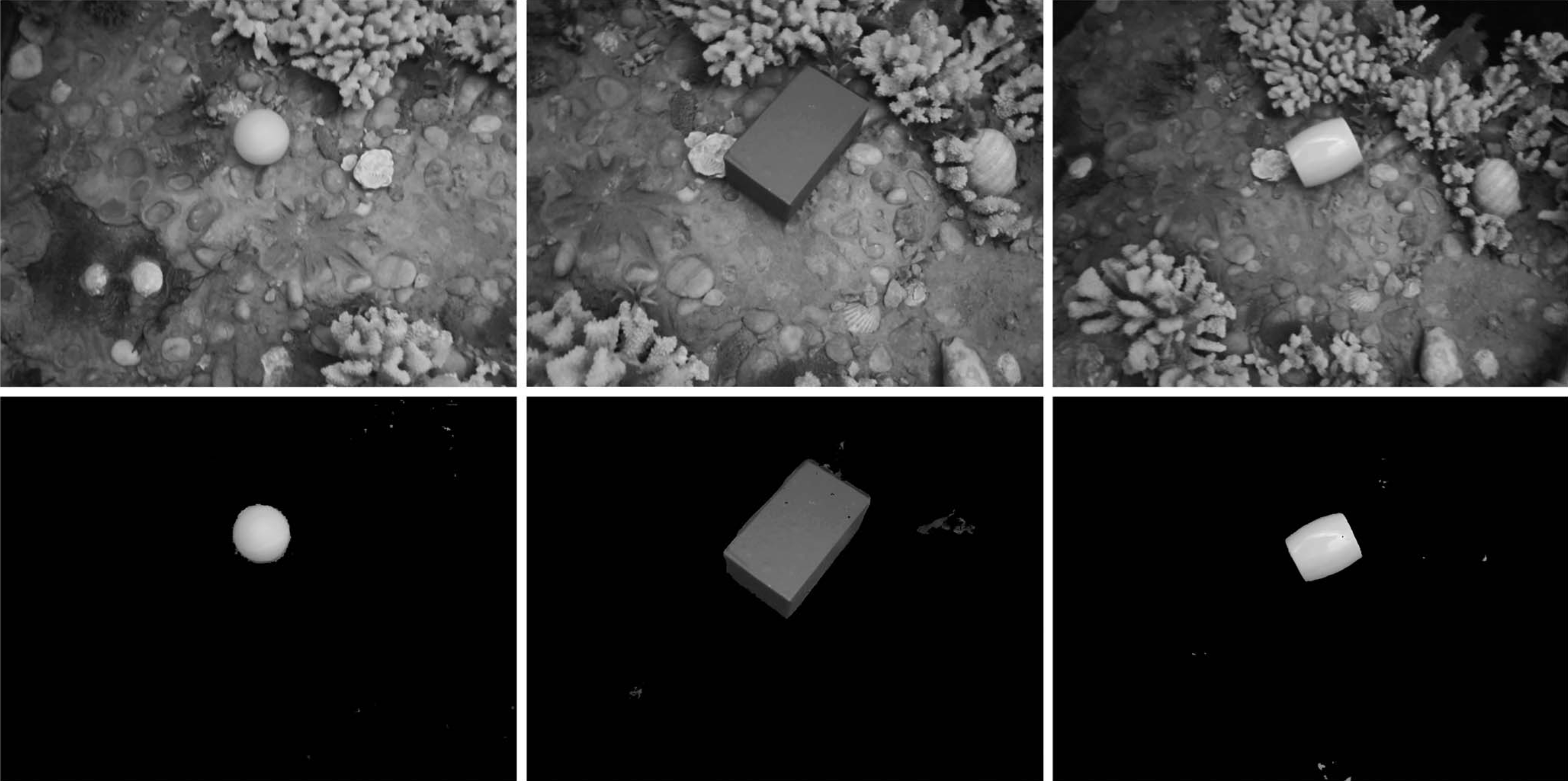
Unlike Ranganathan’s simulation design, Hou’s team used real-world experiments to maximize the accuracy and reliability of their image recognition. The researchers took an image underwater, and its contrast was enhanced and equalized to account for non-uniform lighting. Afterwards, the object of interest was extracted from the environment based on the color differences. An Otsu algorithm was used to remove the background color noise to make clearer distinctions of the targeted object. Finally, a shape-signature-based recognition algorithm determined the shape of the observed object, such as a circle, square, or triangle. To achieve this, the algorithm translated the shape into polar coordinates that are then mapped to determine the number of edges the shape has. The algorithm was then tested by taking photos of objects at the bottom of a 2-meter-deep water tank decorated to resemble a seabed, with sample images illustrated in Figure 3. These are approaches used to mimic real-world situations, enhancing the reliability of the results8.
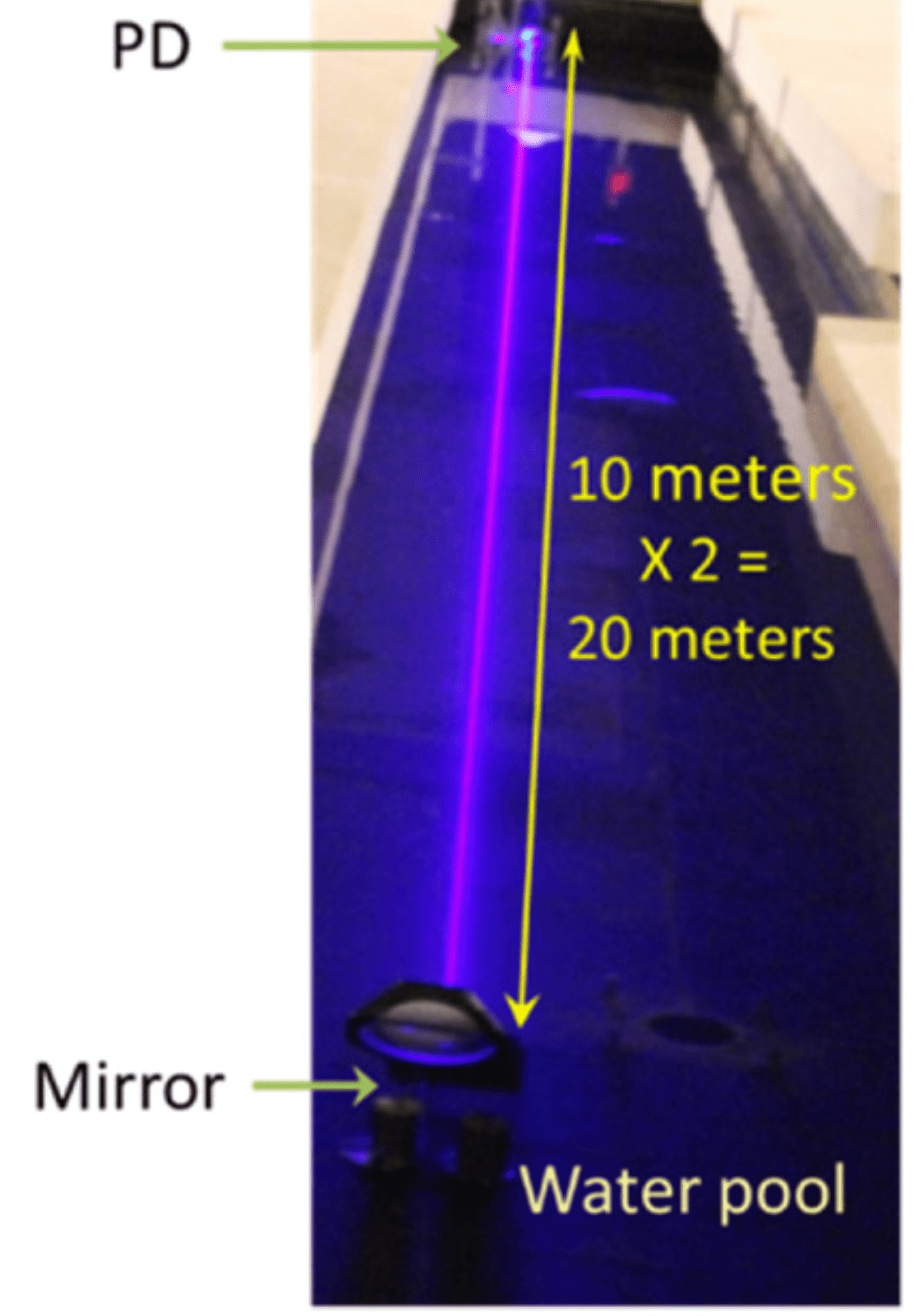
Similarly, Shen’s laser experiment was also done inside a tangible water container, using a 450 nm laser diode emitter and a silicon photodetector as a receiver. The light was flashed at varying distances to mimic the transmission of light underwater. A collimation lens was used on the transmission side to ensure parallel light transmission, and a convex lens was used on the receiving side to focus the light on the silicon photodetector, increasing the intensity of the light received and thus mitigating the absorption of light by water. A spectrometer was also used to determine the rate of transmission at varying wavelengths on the receiving side, which was used to determine the wavelength that is least absorbed by the water medium. The physical experiments again improved the method’s validity and reliability11.
Existing Swarm Robot Projects
The Vertex swarm robot, designed by Schill’s research team, was created as a cost-effective way to monitor underwater aquatic environments. There are four thrusters on each robot, two horizontal and two vertical. The horizontal thrusters provide a forward force that can drive the robot to swim, and the vertical thrusters stabilize the robot and prevent it from tilting. The robots are also designed with synchronized clocks through vibrating crystals, which allow the robots to have a clear time reference when cooperating. To sense the location of surrounding robots, a small acoustic detector and sensor are integrated into each robot. The swarm do not use absolute locations but rather measure the relative distances between one another. With the synchronized clocks, all robots can release an acoustic pulse at approximately the same time. The time it takes for a robot to sense the pulses emitted by others reveals their relative distances to each other, allowing the robots to remain separated underwater13.
Schmickl’s CoCoRo robot swarm is designed to be able to monitor water conditions and search for objects underwater. The robots include a large variety of sensors to determine distance and location, including a 3D accelerometer, compass, and pressure sensor. The researchers aimed to develop robots that could make decisions autonomously when faced with unfamiliar situations, such as distraction objects and malfunctioning robots. To achieve a self-repairing swarm, the researchers mimicked the behavior of immune system cells and how they respond to swarm agent failures, applying the same algorithms and decision-making to the robots. The robots were also trained with artificial neural networks that could transmit “emotions” to other robots locally with electrostatic oscillations in water, allowing the agents to make decisions together. To test the effectiveness of the CoCoRo swarm, the Schmickl group created a water tank that was 3 meters deep and had at least 10 square meters of surface area. The bottom of the tank was covered with natural objects to mimic the underwater environment in lakes and rivers. Objects were thrown into the tank, and robots were deployed to locate the object14.
The M-AUE swarm robots by Jaffe are designed to measure ocean current movements by observing how robot swarms drift underwater. Most underwater robots communicate location by responding to acoustic sounds. However, this would deplete significant energy, as their locations need to be continuously measured for reliable results. To address this problem, Jaffe’s research team created five fixed surface floats that deploy acoustic pings in a controlled sequence, which are passively received by the underwater swarms. With synchronized clocks inside the swarm, the time intervals between the transmissions can then be measured to calculate the robot’s distance relative to the floats, which reveals the location of the robot. The robots are kept to a small size of 1.5 cubic decimeters in volume, enhancing their ability to drift with ocean currents. For accurate measurements, the robot also needs to be at a constant depth underwater. Therefore, the swarm robot moves vertically by adjusting its density using an internal piston, which changes the buoyancy force and thus the height of the robot. The robot swarm’s effectiveness was tested 3 kilometers west of the San Diego Torrey Pines beach15.
Results
Movement, Sensing, and Communication
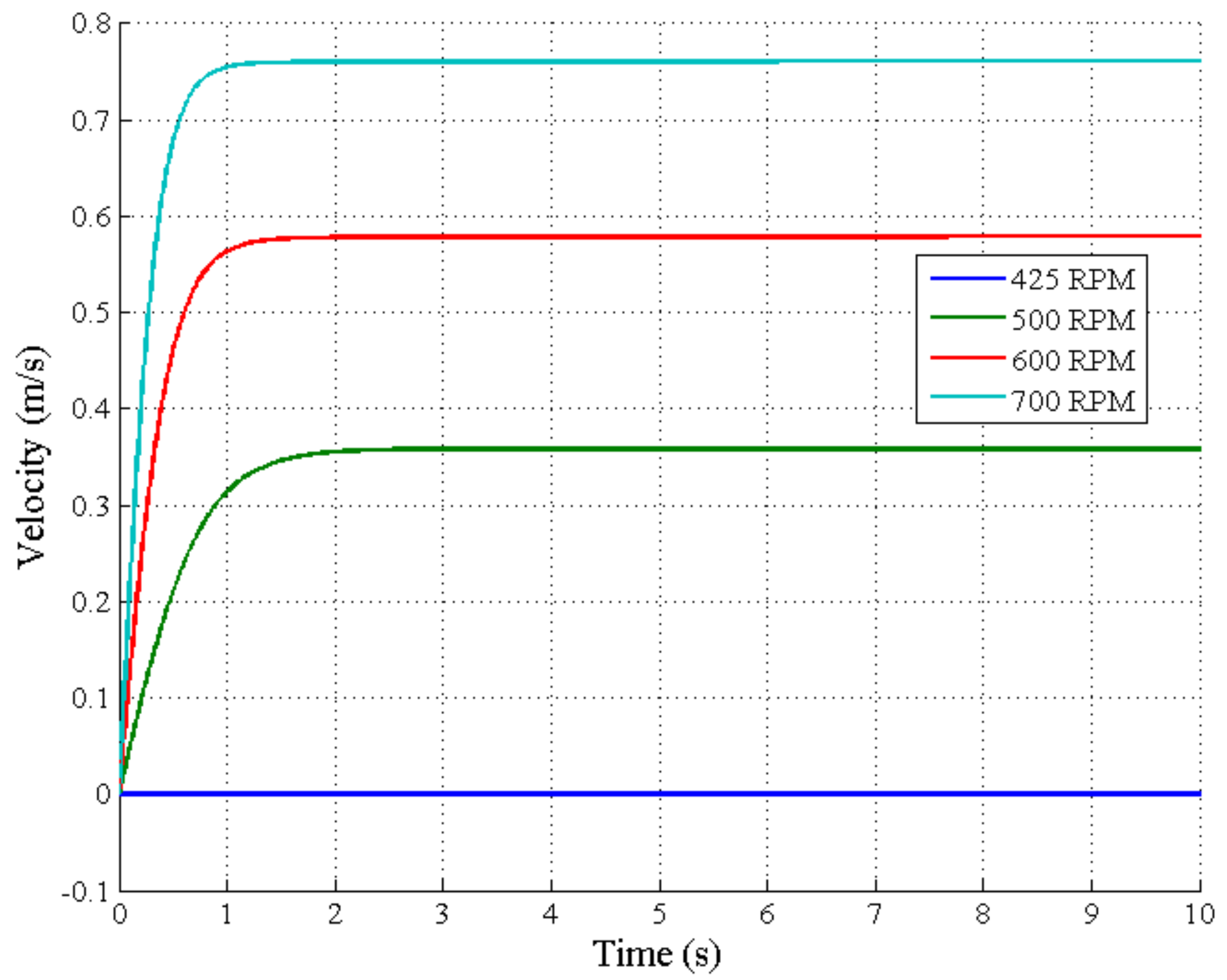
The results Ranganathan collected from the quadra-propeller simulation were generally promising, showing that the robot could accelerate relatively quickly underwater, reaching its maximum speed within a second, suggesting that a quadra-propeller design had high agility. The quadra-propeller can also adjust itself back into the correct orientation after movement, which allows it to maintain stability. However, one issue found was that, because the robot was less dense than water, the buoyancy force is greater than the weight. Therefore, the propellers must spin at 425 rpm to maintain a fixed position, shown by the blue line on the graph in Figure 4. This would result in heavy energy loss just to remain stationary. Consequently, the density of the robot should be as close to that of water as possible when designing quadra-propeller swarms5.
Likewise, the image extraction method for sensing underwater by Hou also had promising results through testing with the water tub. The experiment showed that the color-based extraction method could achieve an average extraction rate of 80%, suggesting that most of the details in a detected object can be distinguished from its environment. The shape-detection algorithm could also correctly identify the shape of the extracted object 90% of the time, achieving a somewhat high accuracy. The image processing also demonstrated that the Otsu algorithm significantly enhanced the clarity of the image, which shows this algorithm’s high importance when creating swarm robots using this sensing method8.
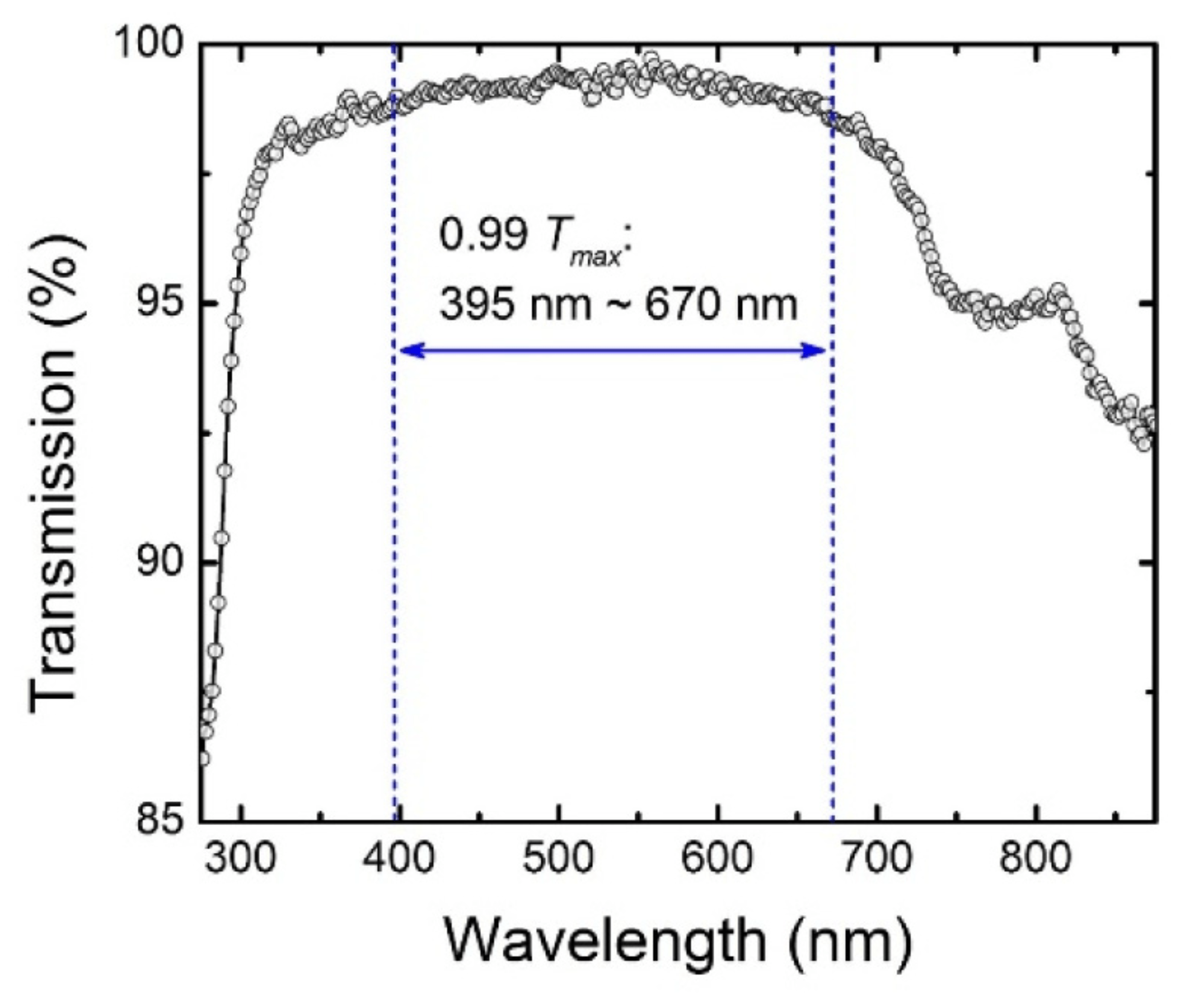
Lastly, the experiment on laser transmission through water as a method of communication by Shen also provided insightful results. By comparing the transmission rate of light at varying wavelengths using a spectrometer, the researchers found that wavelengths between 395 and 670 nanometers could achieve a 99% transmission, as this range had a frequency that could not be easily absorbed by water. The transmission rate is also showcased by the graph in Figure 5, with a peak from 395 to 670. The experiment also revealed that the rate of information delivery increased with the power of the light and decreased with the distance between the source and observer. For instance, the laser could transmit 2 gigabytes per second over a 12-meter-long distance but could deliver only 1.5 gigabytes when the distance increased to 20 meters. These recorded values are highly helpful in designing the laser choice and extent of communication between robots in a swarm11.
Existing Swarm Robot Projects
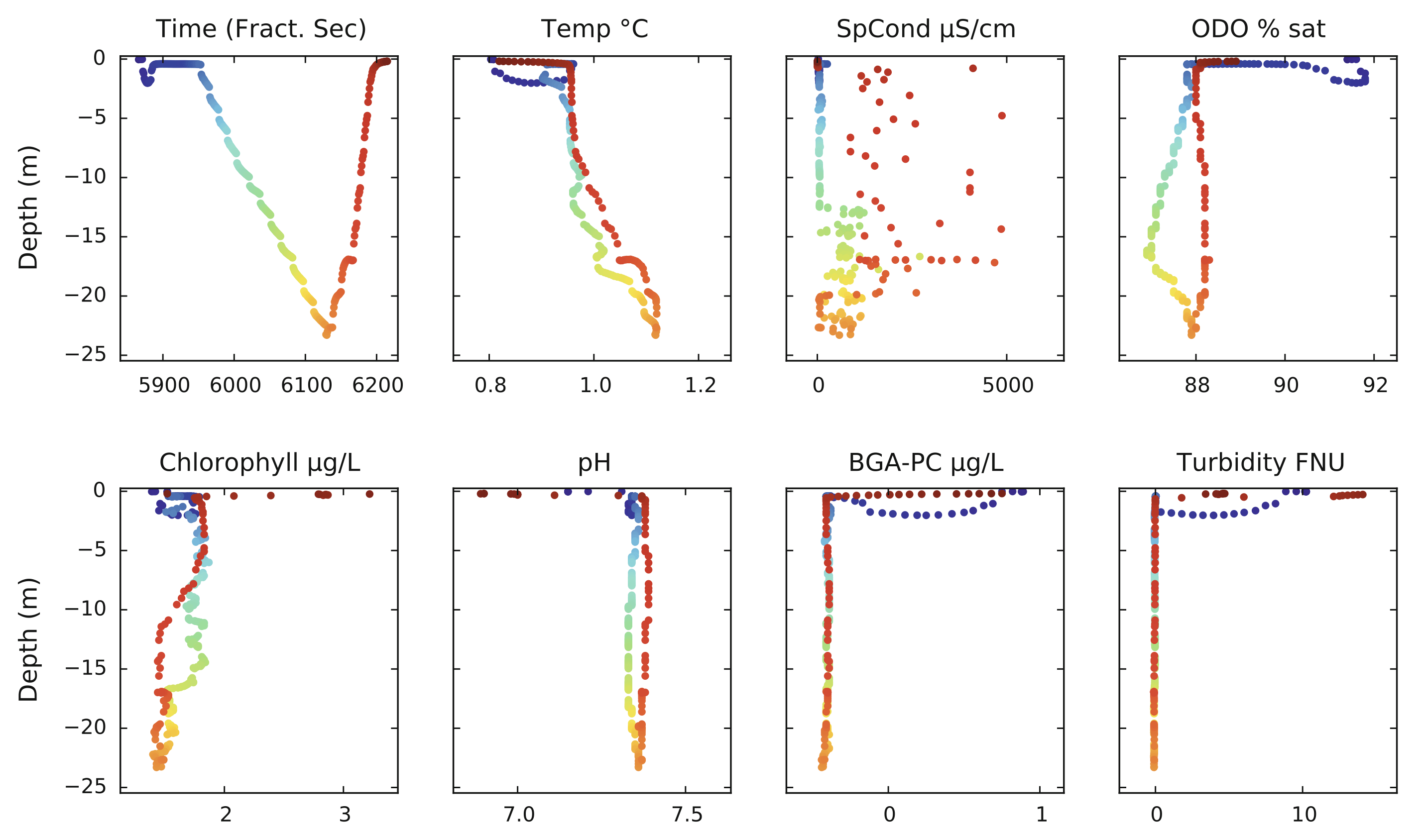
The Vertex robot was designed to be tested in a hardware-in-the-loop system, where a computer simulation creates an imagined underwater environment that the robot then responds to. However, the information transmission to all of the sensors was found to be too difficult to model in real time. Therefore, Schill adapted the testing so that the robot’s microcontroller gave instructions to simulated motors. While this limits the replication of real-world dynamics, Schill’s real-world tests in Lake Onego were also found to be successful, with the robot making measurements while diving 25 meters, which sample results displayed in Figure 6. Observations made by the robot included that temperature increased as water depth increased, while pH and turbidity levels remained constant. The success of the hardware-in-the-loop testing system in these results proved its practicality and effectiveness for future swarm robot tests as well13.
Similarly, the CoCoRo robot swarm was also found to be successful in searching for objects underwater. Throughout the duration of the project, the CoCoRo was applied in various searching applications, as the resulting design was small and convenient to deploy10. The searching robots could swim at a speed of one body length per second and achieve zero-power diving to conserve energy. The robot also successfully avoided underwater obstacles while moving through the rigid terrain. The project’s achievements more clearly demonstrate the importance of decentralized control for the scalability, adaptability, and robustness of swarm robots14.
The M-AUE swarm, due to having different operating tasks from the other two robots, was only partially successful in completing its objectives of ocean dynamic modeling. Once the robots were deployed to the west of the Torrey Pines beach, they successfully drifted with ocean currents northwards over several days. However, one of the key requirements was that the M-AUE must remain at the same depth to take accurate measurements of water currents, at 10 meters below the surface. The testing found that the robot could remain at this depth with a standard error of 1.02 meters, due to the turbulence of the water. These limitations reveal the difficulties in attempting non-conventional swarm movement methods but also show the possible benefits of these innovative approaches as well15.
Discussion
Evaluation of Studies
One problem with Ranganathan’s Quadra-propeller research design is that it is confined to a theoretical framework and computer simulations, which often involve a considerable number of assumptions and simplifications. Therefore, the results lack reliability when implemented into real-world swarm projects to combat environmental problems. Consequently, the lack of evidence for its feasibility might dissuade swarm robot engineers from attempting to implement the Quadra-propeller design in their robots. The research can be improved by testing a physical robot prototype in a controlled aquatic setting, such as a water tank. This will allow the experiment to validate the simulation results and prove the design’s feasibility for aquatic environments5.
By contrast, one key advantage in Hou’s image recognition study is that it uses physical testing, which reflects real-world environments without as many assumptions as theoretical models. The images were extracted with a camera from a water tank, and the tank was also filled with rocks and plants to mimic natural bodies of water, further strengthening the reliability of the results. However, one major problem is that the water tank contained water that was very clean and clear, which does not reflect the murkier and sometimes polluted water conditions of real-world lakes and rivers. Consequently, the method is limited by controlled laboratory environments, where the image recognition is more successful than real-world implementations. This research method can be enhanced by extending the experiment and comparing how different levels of water opacity affect the algorithm’s image recognition accuracy. Other water conditions such as turbulence and salinity could also impact performance. These experimental results will help strengthen the study’s claims that the image recognition algorithm can be reliably applied to robots in natural aquatic environments8.
Closely resembling Hou’s study, Shen’s underwater laser communication experiment also used tap water in the water channel, which is often cleaner than natural sources of water. As a result, the laser could transmit information with much higher bandwidth, as there was no opaque water obstructing the light. Figure 7 reveals the clear water used in the experiment, which could lead to the experimental rate of information transfer being larger compared to real-world rates of communication. This limitation can also be improved by considering water opacity in the experiment and testing more trials in turbid or salty water conditions, which will represent the laser’s practicality in a diverse range of aquatic ecosystems. Also, the experiment setup of the two lenses assumed that the two underwater robots had a clear line of sight between them, which might not be the case in the underwater terrains11.
With the studies on applied aquatic swarm robots, the key strength in all of the research papers is that they have implemented their robots into real-world situations. For instance, Schill’s Vertex robot operated in Lake Onego, and Jaffe tested their M-AUEs off the California coast. As a result, there are high chances that these robots can be applied to solve problems in natural environments.
A potential enhancement for these articles is that the researchers can discuss the various properties of the testing site they have chosen and how those could impact the swarm’s performance. Various underwater factors, such as temperature, water turbulence, salinity, and the marine organisms in the ecosystems, all might impact the success of the robot swarm. These water conditions, especially obstruction from obstacles such as swarms of fish, could severely impede the movement, sensing, and communication of the swarm, limiting their effectiveness. This is especially true for Jaffe’s M-AUE robot on ocean dynamics, as the movement of seawater can vary significantly between regions. Therefore, the research papers can discuss how different water conditions influence the efficiency or accuracy of the robot swarm. This will add stronger realism and credibility to the conclusions and allow other engineers to make more informed choices on which swarm robot designs to implement.
One problem with Jaffe’s MAUE robot was how the robot fluctuated drastically as they floated around in the ocean. Despite being 10 meters underwater, the robots had a depth fluctuation of 1.02 meters due to water turbulence. This error range could significantly affect the accuracy of predicting debris movement, limiting its effectiveness in environmental protection. The fluctuations can be addressed by increasing the speed of the internal piston that adjusts the robot’s internal density. This allows the robot to quickly change its buoyancy by responding to external turbulence and maintain the 10-meter depth.
Another limitation that is present in some of these studies is the lack of exploration of the scalability of the robots. Both Schill and Schmickl have claimed that and explained how their robot swarms are scalable, suggesting that increasing agents would not hinder swarm efficiency. However, the discussions on scalability were based mostly on theoretical reasoning rather than concrete experiments, as their tests have been confined to small groups of robots. Consequently, the lack of concrete evidence weakens the validity of the researcher’s claims. As a paper by Bjerknes and Wifield on swarm robots describes, swarm robots are not scalable by default and become more prone to errors and malfunctions as swarm sizes increase16.
As an improvement, the researchers can conduct controlled tests on the efficiency or accuracy of the swarm as more agents are added. The researchers can set a swarm to complete a certain task in a water tank, such as finding an object for the CoCoRo swarm. The time taken to complete the task can then be measured while adding more and more agents into the swarm. A graph of the task completion time vs. number of agents can indicate whether there is a strong correlation between the two variables and whether the time consistently decreases as more agents are added. These features of the graph can more definitively prove the swarm to be scalable. Another metric that can be measured against the number of agents is the time required for collective decisions, which is another variable that increases with the number of agents added. Both experiments are possible approaches to indicate a swarm’s scalability and adaptability13,14,15.
Other factors to consider include the long-term functionality and cost-effectiveness of the robot. While Schill, Felix, and Jaffe have all designed robots with high potential for practical environmental protection, their long-term practicality remains unclear. Underwater, the robots would face a variety of harsh conditions, including high pressure, acidic corrosion, and growth of microorganisms. These factors could significantly impede the performance of the robots. Therefore, adding experiments or discussions of how these robots are designed to survive repeated operations, such as resistant materials or routine maintenance plans, would enhance their design practicality. In addition, while the robots appear successful in experimental deployment, the real-world costs and budgets required for such swarms might impose another limitation. The construction, deployment, and maintenance of these robots all incur costs that may outweigh the environmental benefits they could bring. Consequently, these studies can improve by suggesting possible future directions to produce cost-effective and commercialized robots while maintaining the same functions in their discussions.
Comparison of Movement, Sensing, and Communication Methods
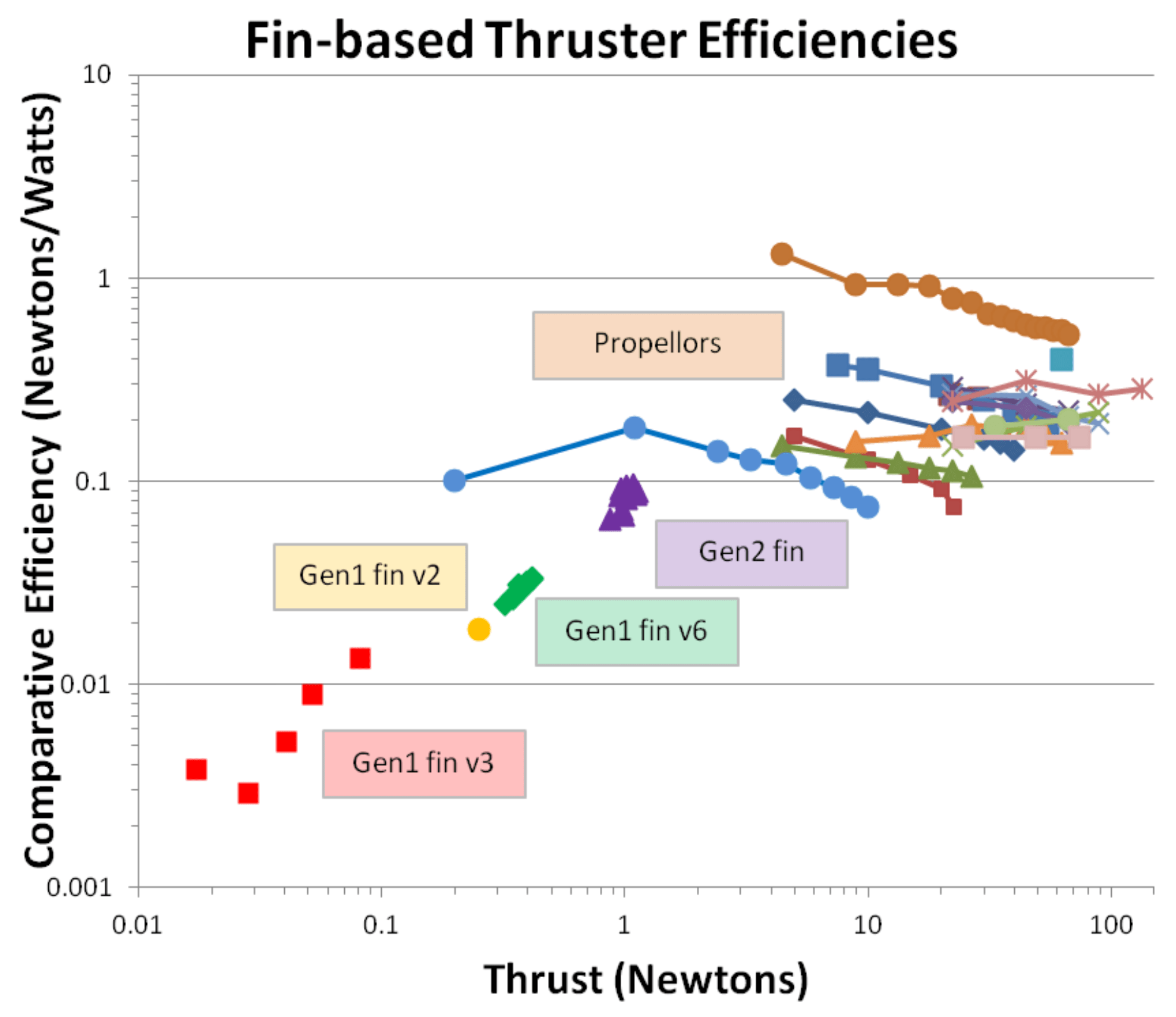
Standard submarines, such as ones explored by Palmisano, use single-directional propellers for forward thrust. However, this hinders the agility of the robot, as it cannot make quick turns and must move in a curve to change direction. This is especially problematic when collecting underwater trash, as robots must constantly change directions to collect multiple pieces of trash. To combat this issue, Rangathan’s Quadra-propeller design improves robot agility, as it can provide thrust in any direction. Another alternative solution discussed in Palmisano’s research is bio-inspired robots, which are robots that mimic the movements of fish. However, current research has failed at achieving energy efficiencies close to those of propeller-based robots. As shown in the logarithmic scale in Figure 8, the efficiency of propellers is mostly between 0.1 and 1 Newton/Watt, while the fish fins range between 0.001 and 0.1 Newton/Watt. This suggests that on average, propellers are orders of magnitude more efficient at propulsion compared to bio-inspired fins. Furthermore, the agility and speed of fish-inspired robots underperform significantly compared to real fish. Therefore, the quadcopter design remains the most promising mechanism for aquatic swarm robots5,6,10.
For sensing in robots, aside from image recognition, the sonar sensing researched by Mandić also shows various strengths. Not only do sound waves travel relatively fast underwater, but they can travel further than visible light. However, one major flaw in sonar sensing is that, unlike image recognition, the identity of the targeted object cannot be known. For instance, image recognition software can distinguish between a circle and a square, while sonars cannot. This is important for trash collection to detect and avoid collecting marine animals by accident. Furthermore, sound waves create constant noise pollution in aquatic environments, while image detection leaves no impact on its surroundings8,9. The noise pollution it creates can also impact marine life in non-lethal but nevertheless hazardous ways. Some observed effects included increased stress levels, disruptions of feeding, and increased energy expenditure. These impacts can all cumulatively reduce the growth of various organisms underwater, which could accelerate the extinction of marine species. The high flexibility and accuracy of the sonar sensors, therefore, comes with an ecological cost that impedes the swarm robot’s ability to contribute towards environmental protection. Consequently, image recognition is a more reliable sensing method for underwater swarms17.
Unlike the sensing in swarm robots, the two communication methods—Shen’s laser transmission and Joordens’s WIFI transmission—are drastically different in their effectiveness. Laser communication could achieve high rates of information delivery, while Wi-Fi signals were far weaker. The lasers could also travel much further than the Wi-Fi signals, with a tested span of 20 meters. This is because WIFI, which has a frequency of 2.4 GHz, is easily absorbed by water. Microwaves operate on 2.45 GHz for this reason. Therefore, the transmission was heavily obstructed when traveling underwater, causing the WiFi to not only travel very small distances but also transfer information at a rate of merely 30 bytes per second. The blue laser method, while effective, does have certain limitations. As mentioned, without a clear line of sight, two robots cannot communicate through lasers. However, this issue can be mitigated by designing swarm control algorithms where the individual robots constantly adjust their positioning to ensure a line of sight between each other10,11,12.
The various sensing, communication, and movement methods discussed are compared in the table below, using the metrics mentioned in the introduction. Some metrics are evaluated qualitatively with a high/medium/low rank based on their relative performance to other solutions, as compared above, if no numerical data is present.
| Movement | Sensing | Communication | |||||
| Metric | Quadra-propeller | Single Propeller | Bio-inspired | Image | Acoustic | Blue Laser | WiFi Signals |
| Energy Efficiency | High | High | Low | Medium | High | High | Low |
| Agility | High | Low | Medium | N/A | N/A | N/A | N/A |
| Accuracy | N/A | N/A | N/A | High | Low | High | Low |
| Effective Distance | N/A | N/A | N/A | Medium | High | 20 meters | <1 meter |
| Data Delivery | N/A | N/A | N/A | N/A | N/A | 1.5 Gb/s | 30b/s |
Extensions to Swarm Robots
Research papers on the key elements of underwater robots, including movement, sensing, and communication, have all been tested using individual robots or machines. Research on robot swarms has also been conducted on relatively small sizes of robot groups due to resource and time restraints. As a result, some mechanisms of the swarm robots could have an increased level of complexity when applied to larger groups of robots swarms16. For instance, while the laser communication by Hou has been shown to work between two agents, communicating to an entire swarm would be far more difficult given the linear trajectory of lasers8. The behaviors of swarms, therefore, are a key component of consideration and interest in this field of research.
Swarm robots are often coordinated using swarm algorithms, which allow for swarm agents to work together to achieve complex behavior despite each agent performing relatively simple tasks. Consensus algorithms allow swarm robots to reach a collective decision based on the votes of individual agents. Each robot calculates their preferred choice from their own observations, and the swarm then agrees on an optimal pathway. The use of large, systematic votes minimizes the chances for misjudgment or decision errors21. Flocking and schooling algorithms allow robot agents to move efficiently together as a swarm. The most famous algorithm is the Boids model, in which each agent follows three simple rules. These include separating from neighbors to avoid collision, moving with the average direction of neighbors, and staying within the average position of local neighbors. Together, these simple rules form complex, lifelike movement patterns22. Task allocation mechanisms, such as auction-based systems, allow tasks to be distributed within a swarm. Each robot “bids” their cost and time to complete the task, and the lowest bid is assigned the task to maximize efficiency23. Lastly, emergent pattern formation allows swarms to form patterns without centralized control, such as schools of fish swarming to avoid predators. These are achieved through local interaction rules that position each robot relative to its neighbors. Together, all four of these swarm algorithms are used to effectively coordinate large groups of swarms, allowing them to maintain scalability and efficiency24.
Another important aspect of swarm robots to consider is the use of heterogeneous and homogeneous swarms. In the chosen studies, the CoCoRo swarm is heterogeneous, while the Vertex and M-AUE are homogeneous. Both types of swarms offer their own unique sets of advantages and disadvantages that allow them to be useful for certain situations. Homogeneous swarms are more cost-effective to produce and more scalable because of their identical nature. Therefore, they are more suited for large-scale operations in vast bodies of water. Heterogeneous swarms have greater diversity and thus can be flexible for a variety of operations and environments. As a result, they can be more effective when navigating unfamiliar aquatic environments or operations where a range of tasks are required. Heterogeneous swarms are also more prone to failure, as the loss of critical roles within the swarm, such as the information transmitter, could jeopardize entire operations. By contrast, homogeneous swarms have identical roles and thus can recover easily from losing some agents. Accordingly, homogeneous swarms can be more practical for dangerous environments or operations where robots are likely to be lost25,26.
Future Directions
While there has been a great deal of research on the applications of swarm robotics in aquatic environments, there remain many future research opportunities. One interesting research direction topic is swarm robots at the centimeter or millimeter scale. More compact robots would not only require fewer materials to construct but also cause minimal environmental damage if they are lost. The M-AUE robot focused on being as compact as possible, at 1.5 cubic decimeters. However, as Jaffe’s research paper states, smaller robots tend to drift more easily with ocean currents and are harder to move with thrusters27. Therefore, novel propulsion designs might be required for feasible robot swarms at this scale10. There are also various other engineering challenges that are current bottlenecks to the development of such robots, including energy storage and communication. One problem with miniature robots is that the energy stored in batteries does not scale effectively with size; thus, small batteries become practically meaningless in holding energy. Consequently, further research can focus on driving swarm robots with external energy sources such as light or electrical fields. In addition, as robots decrease in size, the amount of energy consumed by electronics such as sensors and communication increases much faster relative to their size. Therefore, low-energy electronic equipment must also be needed for swarm robots to be feasible28.
Another investigation topic is bio-inspired robots. Although they currently lag in energy efficiency and thrust compared to propeller-based robots, they still have great potential with further research and development. If bio-inspired robots could be designed with the speed and agility of real fish, they could outcompete both single-propeller and quadra-propeller robots6. In addition, most swarm algorithms originate from natural swarms, a large portion of which are fish swarms. Therefore, fish-like robots can also more easily mimic fish swarms in achieving complex swarm behaviors6.
Lastly, more research should also be directed towards methods by which information can be transferred through water, which includes both sensing and communication. While light and sound are frequently used, they both significantly weaken as the distance traveled increases. This limits the maximum separation distance between individual agents and the area of coverage by the swarm. Moreover, as noted in the evaluation, many light-based studies require water that is mostly transparent, which might not be the case in the real world. Since communication and sensing are such vital elements to achieving environmental protection for swarms robots, more attention in researching them could yield considerable benefits10.
While there are many valuable research areas in the field of aquatic swarm robotics, it is also important to consider the new ways that existing research can be applied to swarm projects. There remain countless possibilities of how developed technologies can be integrated into swarms to more effectively protect environments. For instance, changing the CoCoRo and Vertex robots from their single-direction propeller to a quadra-propeller one could potentially increase their agility. This would allow them to change directions quickly to remain further separated from other agents and to search for underwater objects in more efficient paths for the CoCoRo robots. Additionally, Jaffe’s M-AUE can also integrate image recognition to sense and detect the floating swarms. The image recognition of these floating robots can work in collaboration with the acoustic sensing system to more accurately measure the 3D positions of the robots13,14,15.
Conclusion
This article has explained, evaluated, and compared various research papers on aquatic swarm robotics. The results have answered the research question and suggest that autonomous swarm robots have valuable potential and are capable of protecting aquatic environments29. This is because key elements of aquatic swarm robots—movement, sensing, and communication—have all shown successful results for swarms to assist in environmental protection. Several aquatic swarm robot projects, including the CoCoRo, Vertex, and M-AUE robots, have also successfully accomplished tasks that can help maintain aquatic ecosystems. These tasks include monitoring aquatic environments, modeling water currents, and searching for underwater targets. In the movement, sensing, and communication of underwater swarm robots, the most promising options are quadra-propellers, image recognition, and laser transmission, respectively. However, this article has identified and analyzed several weaknesses in the experimental procedures that could limit their real-world applicability. These include basing results on computer simulations and using clear water as a medium. The article’s evaluation of existing swarm robot projects has also shown that they lack sufficient exploration of swarm adaptability and scalability. Therefore, there are future improvements that still can be made to these research projects. Based on the current literature synthesis, some of the most important research directions include milli- or centi-scale robots, bio-inspired robot thrusters, and new information transfer methods underwater. As water remains a necessity for all life on earth, we must make every effort possible to protect our precious aquatic ecosystems for our future generations to thrive and prosper on this planet.
References
- J. Derraik. The Pollution of the Marine Environment by Plastic Debris: A Review. Marine Pollution Bulletin 44, 842–852 (2002). [↩]
- A. Arenas-Sanchez, A. Rico, M. Vighi. Effects of water scarcity and chemical pollution in aquatic ecosystem: State of the art. Science of The Total Environment 572, 390-403 (2016). [↩]
- S. Doney, V. Fabry, R. Feely, J. Kleypas. Ocean Acidification: The Other CO2 Problem. Annual Reviews 1, 169-192 (2009). [↩]
- A. Luvisutto, A. Shehhi, N. Mankovskii, F. Renda, C. Stefanini, G. Masi. Robotic Swarm for Marine and Submarine Missions: Challenges and Perspectives. IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), (2022). [↩]
- T. Ranganathan, A. Thondiyath, S. Kumar. Design and Analysis of an Underwater Quadra-propeller—AQUAD. IEEE Underwater Technology Conference, (2015). [↩] [↩] [↩] [↩] [↩]
- J. Palmisano, J. Geder, M. Pruessner, R. Ramamurti, Power and Thrust Comparison of Bio-Mimetic Pectoral Fins with Traditional Propeller-Based Thrusters. 18th International Symposium on Unmanned Untethered Submersible Technology (2013). [↩] [↩] [↩] [↩]
- M. Joordens, B. Champion. Underwater Swarm Robotics: Challenges and Opportunities. IGI Global, 718-740 (2016). [↩] [↩]
- G. Hou, X. Luan, D. L. Song, X. Y. Ma, “Underwater Man-Made Object Recognition on the Basis of Color and Shape Features.” Journal of Coastal Research 32, 1135-1141 (2016). [↩] [↩] [↩] [↩] [↩] [↩]
- F. Mandić, I Rendulic, N. Miskovic, D. Nad. Underwater Object Tracking Using Sonar and USBL Measurements. Journal of Sensors, 1-10 (2016). [↩] [↩]
- J. Connor, B. Champion, M. Joordens. Current Algorithms, Communication Methods, and Designs for Underwater Swarm Robotics: A Review. IEEE Sensors Journal 21, 153-169 (2021). [↩] [↩] [↩] [↩] [↩] [↩]
- C. Shen, Y. Guo, H. Oubei, T. Ng, G. Liu, K. Park, K. Ho, M. Alouni, B. Ooi. 20-Meter Underwater Wireless Optical Communication Link with 15 Gbps Data Rate. Optics Express 24, 25502-25509 (2016). [↩] [↩] [↩] [↩] [↩]
- M. Joordens, M. Jamshidi. Consensus Control for a System of Underwater Swarm Robots. IEEE Systems Journal 4, 65-73 (2010). [↩] [↩]
- F. Schill, A. Bahr, A. Martinoli. Vertex: A New Distributed Underwater Robotic Platform for Environmental Monitoring. Springer Proceedings in Advanced Robotics 6, 679-693 (2018). [↩] [↩] [↩] [↩] [↩]
- T. Schmickl, R. Thenius, C. Moslinger, J. Halloy, A. Campo, S. Kernbach, T. Dipper, D. Sutantyo, J. Timmis, A. Tyrrell, M. Read, J. Hilder, C. Stefanini L. Manfredi, S. Orofino. CoCoRo—the Self-Aware Underwater Swarm. 2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops (2011). [↩] [↩] [↩] [↩] [↩]
- J. Jaffe, P. Franks, P. Roberts, D. Mirza, C. Schurgers, R. Kastner, A. Boch. A Swarm of Autonomous Miniature Underwater Robot Drifters for Exploring Submesoscale Ocean Dynamics. Nature Communications 8, 1-8 (2017). [↩] [↩] [↩] [↩] [↩]
- J. Bjerknes, A. Winfield. On fault tolerance and scalability of swarm robotics systems. Springer Tracts in Advanced Robotics 83, 431-444 (2013). [↩] [↩]
- D. Hudson. Potential impacts from simulated vessel noise and sonar on commercially important invertebrates. PeerJ 18, (2022). [↩]
- X. Li, H. Chen, H. Lu, X. Bi, Y. Mo. A method of underwater sound source range estimation without prior knowledge based on single sensor in shallow water. Frontiers in Physics 11 (2023). [↩]
- A. Elfikky, A. Boghdady, S. Mumtaz, E. Elsayed. Underwater visible light communication: recent advancements and channel modeling. Optical and Quantum Electronics 56, 10 (2024). [↩]
- N. Saeed, A. Celik, T. Al-Naffouri, M. Alouini. Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization. MDPI Sensors 18, 51 (2018). [↩]
- S. Ranganathan, M. Mariappan, K. Muthukaruppan. Efficient Distributed Consensus Algorithm For Swarm Robotic. International Conference on Artificial Intelligence in Engineering and Technology 5, (2022). [↩]
- C. Viragh, G. Vasahely, N. Tarcai, T. Sorenzyi, G. Somorjai, T. Sepusz, T. Vicsek. Flocking algorithm for autonomous flying robots. IOP Science 9, 2 (2014). [↩]
- D. Morgan, G Subramaniam, F. Hadaegh. Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming. Sage Journals 35, 10 (2016). [↩]
- M. Coppola, J. Guo, E. Gill, G. Croon. Provable Emergent Pattern Formation by a Swarm of Anonymous, Homogeneous, Non-Communicating, Reactive Robots with Limited Relative Sensing and no Global Knowledge or Positioning. ARXIV, 32(2018). [↩]
- G. Kamika, Y. Douchan. Heterogeneous Foraging Swarms can be better. Frontiers 11, (2025). [↩]
- A. Prorok, M. Hsieh, V. Kumar. Adaptive distirbution of a swarm of heterogeneous robots. Acta Polytechnica 56, 67-76 (2016). [↩]
- J. Jaffe, P. Franks, P. Roberts, D. Mirza, C. Schurgers, R. Kastner, A. Boch. A Swarm of Autonomous Miniature Underwater Robot Drifters for Exploring Submesoscale Ocean Dynamics. Nature Communications 8, 1-8 (2017). [↩]
- K. Karydis, V. Kumar. Energetics in robotic flight at small scales. Royal Society Publishing 7, 1 (2017). [↩]
- J. Connor, B. Champion, M. Joordens. Current Algorithms, Communication Methods, and Designs for Underwater Swarm Robotics: A Review. IEEE Sensors Journal21, 153-169 (2021). [↩]


 and Family-Integrated Care (FIC): Global Trends and Local Provider Awareness in Fresno County, California")
{kind=link}