
Abstract
Based on the hurdles individuals with an upper limb absence face, biomedical engineering advancements have aimed at providing a better quality of life for these patients. Despite that, the market alternatives are expensive, which reduces accessibility and creates a need for the development of more affordable options. This study investigates the possibility of building a functional and under USD 40 prosthetic hand and its performance. An initial prototype was built using an MDF claw, a servomotor, an aluminum foil capacitive sensor and a code programmed with Arduino. A second prosthetic hand was 3D-printed using Polylactic Acid plastic, and a traction system was applied to it. The findings after the performance-testing process suggest that the MDF prosthesis can carry objects that weigh up to 500 grams. Moreover, although the materials used to assemble the MDF claw cost under USD 40, ideally, the 3D-printed prosthesis would cost more than the estimated budget. Thus, this study highlights the viability of building a hybrid-type prosthetic hand without employing overly complex and costly materials. Even so, further studies are required to investigate utilizing either a more specific sensor or implementing a Bluetooth system for precision and convenience increase.
Keywords: Prosthesis, Hand, Capacitive Sensor, Servomotor
Introduction
The human hand enables the execution of a wide range of sophisticated movements for interacting with the environment. The opposable thumb, which also plays a fundamental role, has allowed higher levels of dexterity and a faster evolutionary process compared to other animals, as it provides humans with fine motor coordination and a greater ability to grasp objects1. Nonetheless, individuals without upper limbs encounter substantial challenges in performing everyday tasks. In Brazil alone, motor impairments affect 28% of the population living with disabilities, making it the second most prevalent type of disability2. Fortunately, the development and implementation of innovative technologies have made it possible to mitigate these difficulties, promoting greater independence and an improved quality of life for amputees3. Research by Sinha et al. (2011) further supports this, showing that the use of prostheses is significantly associated with improvements in both physical and psychological well-being4.
Throughout history, various prosthetic technologies have been developed to provide users with greater comfort, practical usability in daily life, and improved performance. The origins of prosthetic devices can be traced back to the 16th century, with documented illustrations of motorized arm and leg prostheses by Ambroise Paré — an innovative physician and pioneer in surgical procedures5. Although the concept of prosthetic technology has existed for centuries, research in this field remains relatively limited and often lacks depth. High-quality, comprehensive studies are still scarce, highlighting the need for continued innovation, particularly in advancing solutions that support the social and functional reintegration of individuals with disabilities6. While prosthetic devices represent a feasible solution to upper limb loss, one of the main barriers to widespread adoption is their high cost, which renders these devices inaccessible to many individuals.
A global analysis highlights that the limited availability of affordable prosthetic services and devices remains a critical and widespread issue, particularly in low-resource settings. McGimpsey and Bradford (2006) report that millions of individuals in developing countries lack access to functional prostheses, not only due to cost, but also because of inadequate infrastructure for fitting and maintenance. This significant unmet need reinforces the urgency of creating alternative, low-cost, and easy-to-produce prosthetic solutions.
To gain a deeper understanding of prosthesis development, existing studies on upper limb prosthetic systems were reviewed, including those by Jacob Segil and colleagues7, as well as PJ Kyberd and PH Chappell8. While both models analyzed are impressive examples of contemporary engineering—featuring advanced design and high-quality materials, their production costs are significantly elevated. As a result, these devices remain out of reach for low-income individuals. A manufactured prosthesis, for instance, can cost between USD 4,000 to 75,0009. Nevertheless, recent technological advances have opened opportunities for the development of more affordable, modern, and efficient prosthetic solutions, offering greater accessibility to a broader population.
Furthermore, prosthetic hands available through the e-NABLE community, such as Jeremy Simon’s Unlimbited Phoenix Hand10 and Osprey Hand11, were examined as representative open-source models for low-cost prosthetic design. These devices emphasize accessibility, simplicity, and innovation, but they generally rely on body-powered traction systems and lack electronic actuation. In contrast, the prototype described in this study integrates a servomotor-driven grasp and a homemade capacitive sensor while maintaining materials cost below USD 40. Unlike most existing open-source models, this work integrates both the electronic control system and the mechanical design to support reproducibility and further development.
The primary functional prostheses for upper limbs are categorized into active, myoelectric, or hybrid types. Active prostheses are controlled by the user through wires or cables and require more maintenance. Myoelectric prostheses, on the other hand, are controlled by software that receives input from sensors which detect electrical signals produced by muscle contractions. Hybrid prostheses are controlled by both methods12. In the operation of the myoelectric model, a mechanical motor works as an output, receiving code from the software, a program, such as Arduino, that runs on a computer.
Recent advancements in neural engineering have significantly improved the control of upper-limb prostheses through surface electromyography (sEMG). This technique enables the extraction of neural information from muscle activity via non-invasive skin-surface electrodes, allowing for precise and intuitive control of prosthetic devices. As discussed by Farina and collaborators (2014)13, sEMG systems can decode complex motor commands and enable multi-degree-of-freedom movement in real time. However, such systems often rely on expensive sensors and high-processing hardware, which limits their use in low-cost applications. In contrast, this study explores a more accessible approach: a myoelectric prosthesis with a homemade capacitive sensor built from aluminum foil, which detects changes in capacitance caused by subtle forearm movements. Although this sensor does not directly read bioelectric signals like sEMG, it functions as a simplified control mechanism based on user-initiated muscular shifts—offering a low-cost alternative for basic prosthetic activation. Prior testing ensured that the signal detected by the aluminum sensor was a result of deliberate muscle contractions and not environmental interference. The prototype is controlled by a servomotor, which operates the movement of the fingers. Nylon threads function as tendons, following the flexion/extension of the finger, being sufficiently loose to allow the finger to move through the servos14.
Moreover, a technology related to the materials used in prosthetic production that is currently experiencing rapid growth is three-dimensional printing. This method significantly reduces material cost and enables customized sizing, tailored to meet the individual needs of users. Children, for instance, benefit greatly from this affordability and flexibility, as they require frequent prosthetic replacements due to ongoing growth15. Three-dimensional design also polishes the cosmetic appearance of artificial hands, which is crucial since a lack of aesthetic appeal may discourage amputees from using their prosthesis regularly16.
Lastly, to assure prosthetic performance needs and capabilities align with the expected outcomes present in successful commercial and research devices, benchmarks have been established in prosthetic literature. Belter et al. (2013) have defined weighing under 500 g, producing sufficient pinch force (≈65 N), operating at a responsive speed (115–230°/s), and incorporating features like thumb mobility, compliance, and durability as the main parameters that provide a framework for evaluating new prototypes17.
In light of these considerations, this study investigates the viability of developing a functional prosthesis capable of holding up to 500 grams with a success rate of at least 70%, maintaining the grip for over 30 seconds and costing no more than USD 40, while considering the accessibility and simplicity of its production for amputees, alongside advancements in biomedical engineering.
Methods
Preliminary Models
Before building prototype 1, three simple models were made: a cardboard finger, a wooden finger, a cardboard hand, and a servomotor connected to the sensor. These preliminary tests were performed to check whether the finger joint system would work, before developing the official prototype.
The prototype would be considered functional if it could lift objects of increasing mass up to at least 500 g, with a success rate of ≥75% over multiple trials. Failures would be defined as slippage or inability to raise the object to a height of 10 cm.
Prototype 1
Design and Assembly
To build Prototype 1 (Figure 1), the materials used were an Arduino set, straws, nylon threads, hinges, and a MDF Y-shaped piece.
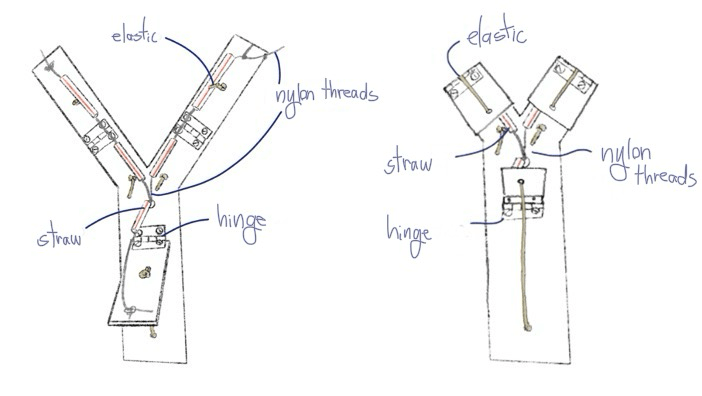
The first step was to sketch a prototype on paper, detailing the correct proportions (two rectangles measuring 3×7.5 cm each, one rectangle measuring 3×6 cm and a final Y-shaped piece). Subsequently, a digital design was created with the previously established proportions. Then, the design was cut out of MDF using a laser cutter, and the prosthesis was assembled, including hinges, nuts, screws, nylon threads, elastic threads, and sandpaper strips for the fingers.
Hardware and Software Integration

A small structure of hardware components, including the aluminum foil capacitive sensor, the servomotor, the Arduino pieces and 1.5 V each, providing 6.0 V in series, with a capacity of 2,500 mAh and an effective runtime of roughly 4–5 hours at a 500 mA load (≈500 g mass at 5 cm arm length on the MG995) were integrated to operate the prototype (Figure 2). The hardware components can be viewed at: https://www.tinkercad.com/things/6W5CbXHCqeD-arduino-hardware-prosthetic-hand.
After that, the software code that controls the operation of the servomotor and the detection of movements by the capacitive sensor was programmed. The software code is available at: https://github.com/prosthetichandprototype/arduino-prosthetic-hand/blob/main/servo_motor_code.ino. The code aimed to integrate what was detected by the sensor with the rotation performed by the servomotor.
The Arduino code used to control the system was tested using a capacitive sensor circuit connected between digital pins 4 (send) and 2 (receive), with a 10 MΩ resistor. The sensor reading was processed every 30 cycles using the capacitiveSensor(30) function from the CapacitiveSensor library.
Sensor Operation
The sensor consists of a wire connected to an Arduino board and a strip of aluminum foil, which is fixed around the arm. Since the servomotor requires more current than the laptop’s USB port can safely supply, an external battery was necessary to prevent the computer from shutting down. Without this external power source, the servomotor could draw too much current, potentially overloading the computer’s power supply. To prevent this, the battery was connected to the protoboard, powering the servomotor, while the computer provided power to the Arduino.
The aluminum foil, due to its metallic bonds, has many free electrons, making it an excellent electrical conductor. When used in the sensor, it functions as part of a capacitive sensing system. In this system, the aluminum foil can detect changes in the electric field caused by nearby objects or movements. Through the movement of the aluminum strip, the redistribution of electrons alters the capacitance, which creates a small electrical signal. This signal serves as input for the system, sending a trigger to activate the servomotor. The dynamic of how this input is processed and used to control the servo is defined by the software code that was developed.
Prototype 1 Tests
The first set of tests carried out related to the mechanical components and abilities of Prototype 1:
Servo motor’s rotation: Tests were conducted to verify if the servo motor’s rotation would function as intended. Once the desired result was achieved, the servomotor was attached to the MDF model, and its ability to lift objects was tested.
Weightlifting tests: The main independent variable was the power exerted by the servomotor, while the dependent variable was the force the prosthesis can generate to lift objects. Various load masses were used to evaluate the servomotor’s efficiency and its ability to lift objects. The load was gradually increased from 50 grams to 100, 250, 400, and 500 grams to test the limits of the prosthesis.
Lifting efficiency of objects with different shapes, materials and orientations: this test was conducted using objects of different shapes, materials, and sizes to evaluate the prototype’s performance. Four objects were selected: a smooth glass container, a textured plastic bottle, a soft sponge, and a coin. Each object was grasped in two ways: from the top (e.g., gripping the rim or upper edge, as if picking up a cup by its lip) and from the side (e.g., gripping the body or lateral surface, as if holding the middle of a bottle). All lifting tests were performed vertically, lifting the objects upward from a resting position against gravity. This allowed assessment of how well the prototype adapts its grip depending on the contact area and orientation of the object. For each trial, it was recorded whether the object was successfully lifted without slipping or dropping.
Durability testing: to estimate the operational lifespan of the prosthesis, a cyclic opening–closing test was designed. The prosthetic hand was fixed to a support structure, and the sensor was repeatedly triggered to simulate real use. Each open–close sequence was counted as one cycle, and the process was continued until functional failure occurred. The test focused primarily on the elastic components, as they are the most likely to experience fatigue and wear during repeated operation. The number of cycles completed before loss of function (e.g., insufficient finger return or elastic rupture) was recorded.
Next, to ensure that the signal detected by the capacitive sensor was indeed a result of muscle activity—and not due to environmental interference—two validation tests were conducted.
Voluntary contraction: the sensor, an aluminum foil strip connected to the Arduino, was wrapped around the user’s forearm, above a muscle group. The user was instructed to alternate between contracting and relaxing the forearm muscles.
Control test: this test was carried out to assess potential environmental interference. With the user’s arm at rest, external stimuli were applied, including tapping the table, bringing metallic objects near the sensor, and directing airflow from a fan.
More tests were carried out to verify the response time of the sensor-servo mechanism, the presence of jitter in servo actuation, the sensor’s change in capacitance, its latency, its detection accuracy and its long-term stability.
Responsiveness of the servo-sensor mechanism: the interval between sensor activation through muscle contraction and the servo motor’s movement, as well as the presence of jitter, were observed.
Capacitance amplitude: by analyzing the variations in the Arduino’s Serial Monitor values, the change in capacitance was measured.
Latency: it was measured using Arduino timing functions, recording the time between the activation of the capacitive sensor and the command transmitted to the servomotor. Each subject performed multiple repetitions, and the median latency values, together with their variation, were calculated to verify the stability of the system. Latency between sensor activation and complete closure of the prosthetic grip was measured. Response times of ≤400 ms were classified as successful, while delays exceeding this threshold were considered failures. The capacitive sensor was evaluated by alternating blocks of trials with voluntary muscle contractions and at-rest conditions. Accuracy was calculated through the proportion of correct detections relative to total trials. A minimum acceptable level of 80% accuracy was defined.
Detection accuracy: it was also assessed by comparing randomized blocks of trials in which subjects either contracted their forearm muscles or remained at rest.
Long-term stability: a cycle test was performed in which the prosthesis executed a standardized gripping and lifting task repeatedly. A cylindrical container weighing 250 g was grasped, lifted to a height of approximately 10 cm, and released in consecutive repetitions. A total of 200 cycles were carried out under the same conditions. To assess durability, the prosthesis would undergo repeated gripping and lifting cycles using a standardized object. A reduction of no more than 10% in success rate across 200 consecutive cycles would be considered acceptable, while larger declines would indicate mechanical instability.
Prototype 2
Design and Assembly
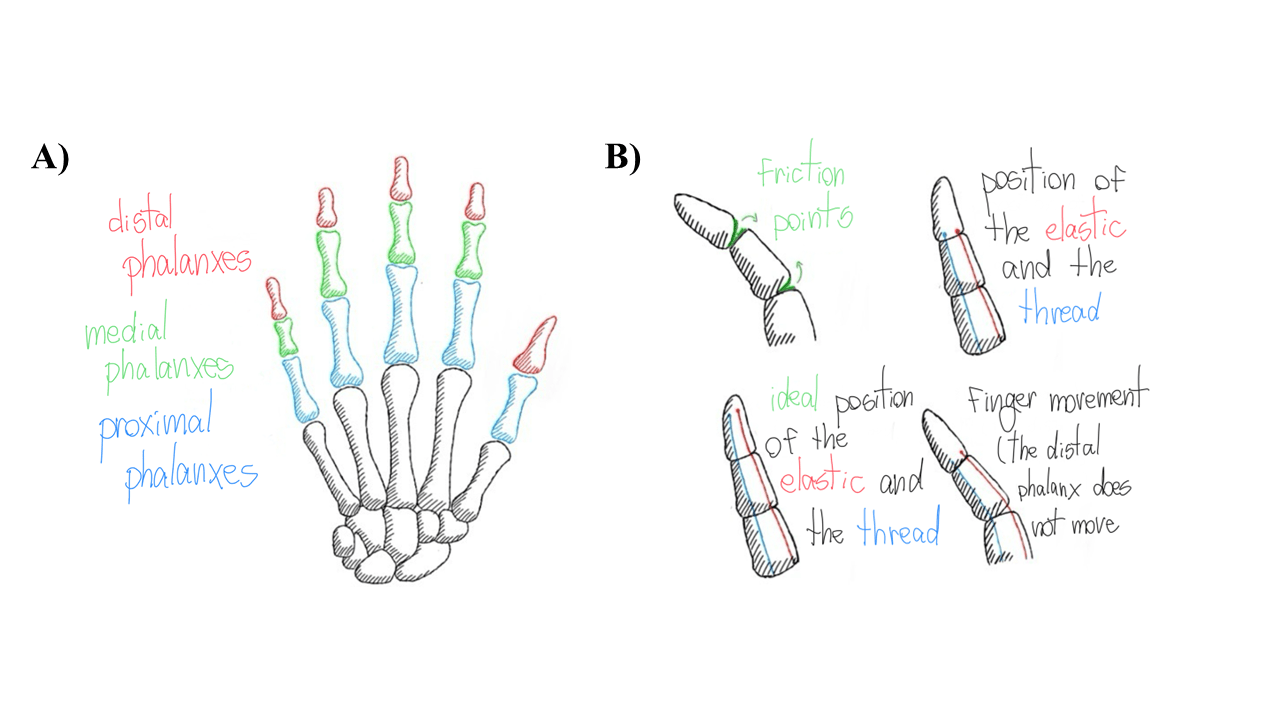
This prototype (Figure 3) was based on a pre-existing 3D model of a human hand, featuring anatomically segmented components—such as phalanges and palms—which were printed as separate, articulated parts rather than a single solid piece. The pre-existing 3D hand model can be found at: https://www.thingiverse.com/thing:906098.
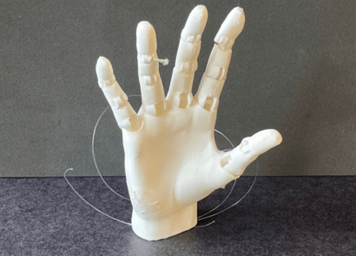
To allow movement and connection between the separate parts of Prototype 2 (Figure 4), a similar elastic-nylon thread dynamic was applied based on Prototype 1’s results. Before that, each printed segment’s surfaces were rounded with silicon carbide sandpaper. Subsequently, a nylon thread was attached with an elastic thread to each finger in the bottom region of the distal phalanxes and passed through the structure of the hand.

No tests were performed with Prototype 2, as no servomotors were attached to the prosthesis.
Motion Simulation
Prototype 2 demonstrates how the fingers would move when pulled by the nylon threads, simulating the motion that could be achieved with the application of a servo. Furthermore, it offers a design that is both more anatomically accurate and aesthetically refined, which contributes to the overall realism and user appeal of the mechanical system.
Results
Low-fidelity and Medium-fidelity Prototypes and Materials Modifications
Throughout the project, several models which helped with the improvement and development of Prototype 1 were built. During this process, the materials were replaced to reach the desired results with improved characteristics, such greater resistance, and smoother motion (Table 1).
| Materials replaced | Materials used in prototype 1 |
| Cardboard | MDF |
| Cotton twine string | Nylon thread |
| Nylon thread without straws | Nylon thread with straws |
| Kraft paper (used between the hinges) | EVA (used between the hinges) |
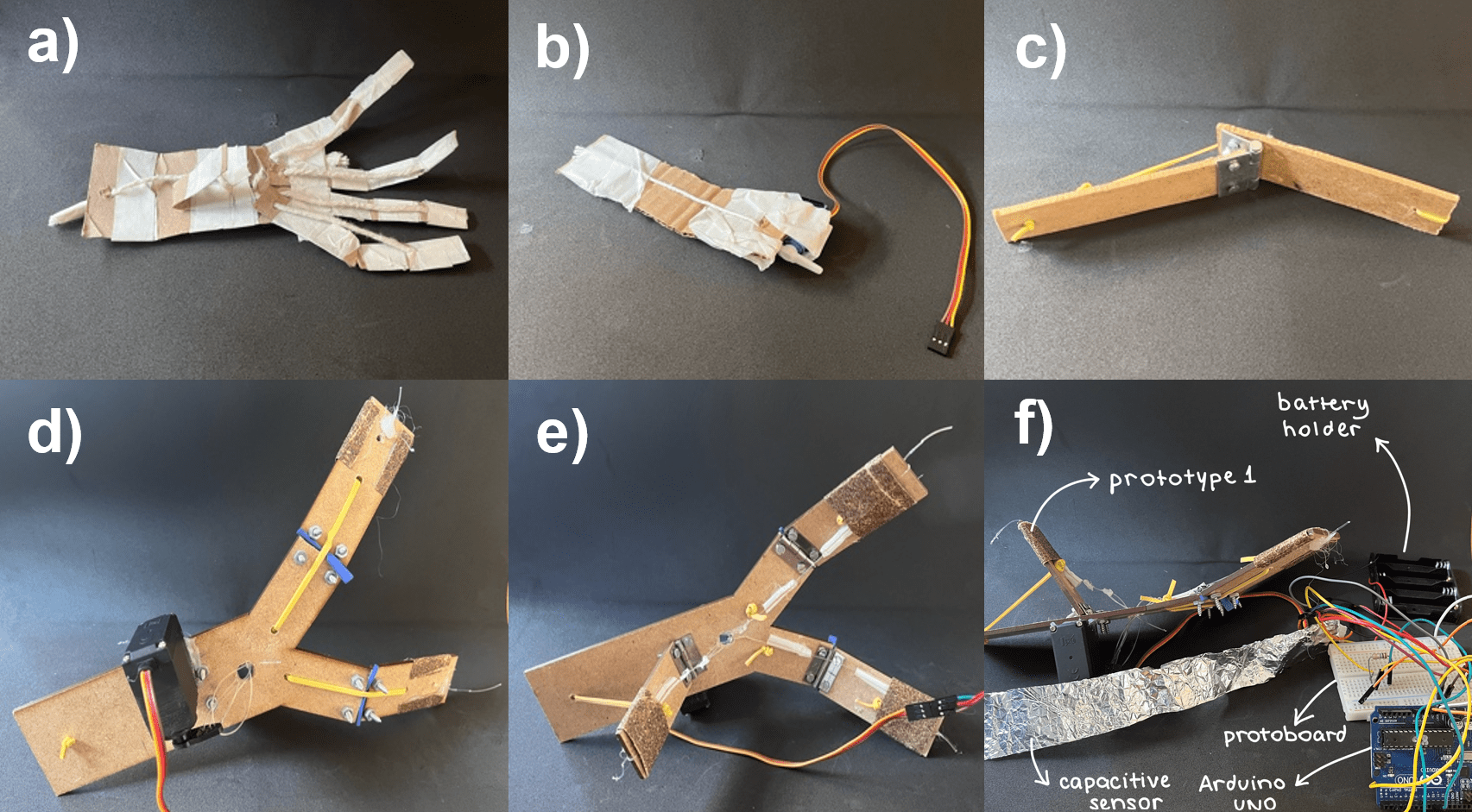
The development process of the models for Prototype 1 followed a chronological sequence, with each stage increasing in complexity. The three initial models (Figure 5a, b and c) were classified as low-fidelity prototypes, serving primarily for conceptual testing and structural validation. Prototype 1 (Figure 5, sections d, e and f) and Prototype 2 (Figure 3) were considered medium-fidelity models, incorporating more refined design elements and functionality. The sequence of prototypes was listed below, in the order they were developed and according to their respective levels of fidelity:
Model 1: A basic hand model was constructed using cardboard, masking tape, and cotton twine (Figure 5a). Finger movements were manually controlled using tensioned cotton twine strings, simulating basic flexion.
Model 2: A single-finger prototype was developed using the same materials (cardboard, string, and masking tape), with the addition of a servomotor attached to the base (Figure 5b). The servo enabled active flexion of the finger, marking the first instance of motor-driven actuation in the development process.
Model 3: A representation of a finger was assembled using MDF in a rectangular form (Figure 5c). This model included hinges at the joints to allow bending and incorporated an elastic band, which enabled the finger to return to its original position after flexion, simulating a passive extension mechanism.
Prototype 1: A Y-shaped hand prototype was constructed using MDF. It was designed with three fingers articulated by metallic hinges at the joints, which were placed to connect the separate pieces of MDF and offer flexion between them. Small EVA foam segments were inserted at the joints to secure smoother motion. Elastic threads were used to return the fingers to their original position after flexion. The closing motion, which resembled a claw-like grip, was achieved by pulling nylon threads attached to each finger. To guide these threads, avoid contact and therefore mitigate friction between the claw and lifted object, plastic straws were affixed to the MDF structure, allowing smooth passage of nylon threads and improved control of the movement.
Prototype 1’s Tests Performance
Mechanical components and abilities tests
Weightlifting tests: Load tests were conducted with Prototype 1, in which weights were incrementally added to a cylindrical container to assess the prototype’s maximum load capacity, measuring how much load the device was able to resist before the lifted object slipped or was dropped (Figure 6).
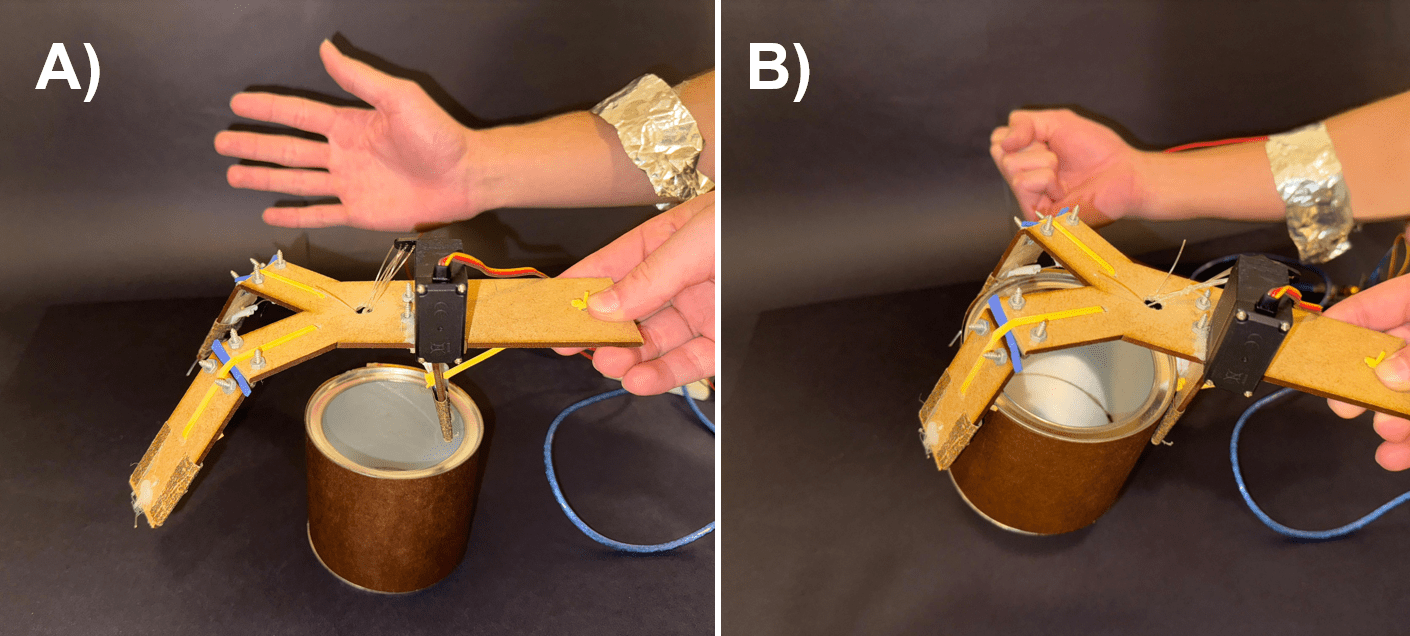
With these tests, the following results were obtained (Table 2):
| Mass of the object carried | Was prototype 1 able to lift the object? | Level of difficulty |
| 25 grams | Yes | Low |
| 50 grams | Yes | Low |
| 100 grams | Yes | Low |
| 250 grams | Yes | Low |
| 400 grams | Yes | Medium |
| 500 grams | Yes | Medium to high |
| 525 grams | Yes | High |
| 550 grams | No | Unable to lift |
Lifting efficiency of objects with different shapes, materials and orientations (Table 3):
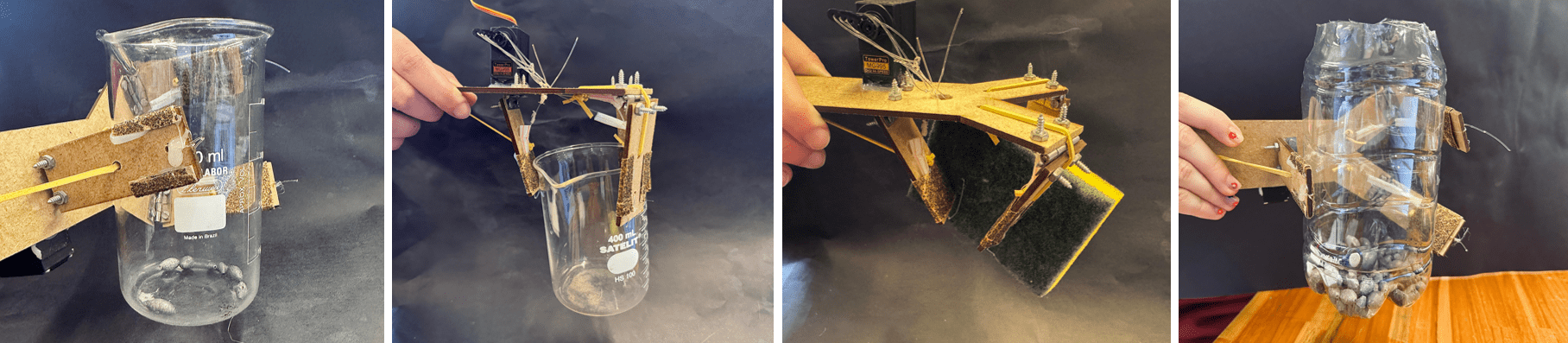
| Object | Material | Shape | Top Grip Result | Side Grip Result | Notes |
| Glass container | Smooth glass | Cylindrical | Success | Success | Was tested with a 203g mass inside the container |
| Sponge | Soft foam | Rectangular | Sucess | Success | – |
| PET bottle | Textured plastic | Cylindrical | Fail | Success | Was tested with a 505g mass inside the container |
| Coin | Metal | Sharp-edged, flat and round | Fail | N/A | Grip too weak for thin objects |
Durability testing: The cyclic testing showed that the elastics experienced gradual wear, with a noticeable loss of tension after approximately 220 cycles. Complete rupture of at least one elastic occurred before reaching 300 cycles, rendering the prosthesis unable to return its fingers to the fully open position. No significant structural damage was observed to the metallic joints or MDF support during this test.
Tests related to the capacitive sensor
| Type of Test/Analysis | Results |
| Voluntary contraction test | Observations showed that the servomotor was activated only during voluntary contractions, while the system remained inactive during complete muscular relaxation. |
| Control Test | All of the analyzed conditions (tapping the table, bringing metallic objects near the sensor, and directing airflow from a fan) caused moderate interference evidenced by slight claw movement, but not full closure. |
| Responsiveness of the servo-sensor mechanism | Based on serial monitor output and stopwatch comparison, the measured delay between muscle contraction and servo response was consistently around 200 milliseconds. Across more than 30 consecutive trials, no instances of jitter, inconsistent triggering, or perceptible lag were observed. |
| Capacitance amplitude | The Arduino Serial Monitor readings varied from 51 to 63 while the servo motor actuation was activated via muscle contraction detected by the sensor. |
| Latency testing | Each subject performed 40 repetitions, and the results showed a median latency of 185 microseconds (IQR: 170–198 µs). This value indicated that the system consistently responded within a very short time window, with minimal variation between trials. |
| Detection accuracy | Across 100 trials, the system achieved a detection accuracy of 84%, with occasional false positives when metallic objects were brought close to the capacitive sensor. Despite these isolated interferences, the overall results demonstrated high reliability. |
| Long-term stability | The success rate was 84% during the first 100 cycles and 78% after 200 cycles, demonstrating only a slight reduction in effectiveness over time. Failures were primarily related to partial loosening of nylon threads and progressive wear of the elastic bands responsible for finger extension. Importantly, the capacitive sensor preserved stable detection thresholds, and no significant increase in latency or false activations was observed. |
Discussion
Improvements and Modifications in Prototype 1
Based on what was analyzed in the construction and testing of the models, it was possible to verify what would be maintained and what changes would be made in the construction of prototype 1. Firstly, elastics proved to be efficient in providing the fingers with the action of returning to their initial position, therefore they were kept.
Furthermore, based on the cardboard hand model, it was initially decided that cotton twine strings were the most suitable to provide the bending motion of the phalanges. However, after producing and testing the MDF prototype, it was observed that the cotton twine material caused a lot of friction, making it difficult to move the fingers. To address this limitation, cotton twine strings were replaced with nylon threads, which caused less resistance and facilitated operation. This modification was inspired by the findings of L. Dunai and colleagues12, who utilized a similar nylon-like material. The authors emphasized that nylon threads, which act like tendons, execute minimal friction, thereby facilitating smooth finger flexion during the pulling motion.
In addition, when compared to the myoelectric hand called HACKberry, developed by the open-source community Exiii using 3D printing, the prosthetic hand prototype presented in this work, which features a servomotor and capacitive sensor, adopts a similar open-source approach. However, in this design, aluminum foil was chosen over an infrared sensor due to its lower cost and ease of integration, while still enabling effective user input. Unlike the HACKberry, which uses a LiPo battery, a component that adds cost and complexity to the system, this prototype avoids such elements to preserve affordability and ease of replacement in low-resource settings18.
Additionally, the nylon threads were routed through cut straws, a strategy intended to prevent threads from interfering with the hand’s grasping ability by obstructing the area needed for object manipulation. This indeed improved grip stability. However, during traction tests we noticed that the unevenness of the MDF surface created slight resistance when the threads passed through the straws. This adjustment was therefore partially successful: while it enhanced object handling, it also introduced a new mechanical limitation that we discuss as an area for refinement in future designs. The code controlling the sensor and servo motor also demonstrated consistent performance, with response times to muscle contractions observed to be under 200 milliseconds. No jitter or irregular delays were detected throughout repeated tests, confirming the system’s reliability and suitability for real-time prosthetic control and the aluminum foil structure assembled for the sensor was effective in its function. Another change was made to enhance grip stability. Sandpaper was affixed to the fingertips, therefore increasing friction between the MDF gripper and manipulated objects and reducing slippage.
Evaluation, Challenges, Limitations and Future Directions
Prototype 1
During functional testing, the prosthesis demonstrated the capability to lift objects weighing up to 500 grams, albeit with some difficulty. Even so, future designs would benefit from employing more powerful servomotors to increase load-bearing capacity and enable users to perform more complex motor actions with the prosthesis, like carrying groceries, for instance.
Different materials and shapes were also tested, which was fundamental to ensure that the amputees using the prosthesis would be able to execute essential daily tasks, such as drinking water. In future studies, it would be interesting to perform more complex and professional clinical tests that are used to quantify hand function, such as the Jebsen Taylor Test of Hand Function (JTHF), as proposed by Godfrey et al. (2018) in the SoftHand Pro prosthesis19.
Regarding the durability test, the findings indicated that the elastic elements are a limiting factor in the long-term performance of the prosthesis and would require periodic replacement to maintain functionality. Satriawan et al. (2023), who used elastic ropes in their design, similarly identified this as a drawback. However, they also addressed the local availability of the material, which highlights accessibility despite concerns about the need for regular replacement20.
Another constraint was the use of a sensor that was not specifically designed for this function. The sensor employed was rudimentary and overly sensitive, which could impair movement control. The slight movement of the claw observed during the control tests indicated that the sensor was susceptible to external electrical or mechanical noise. Nevertheless, this did not compromise system performance, since full closure only occurred during actual muscle contractions, as proven by the voluntary contraction test. These tests, although qualitative in nature, were sufficient to confirm that the capacitive sensor captured changes in the electric field. Still, replacing it with a more precise alternative could enhance the system’s performance. Surface electromyography (sEMG) sensors, for example, are widely used in commercial applications and scientific research. They detect muscle activity without requiring invasive procedures, making them excellent candidates for such systems21.
When analyzing the responsiveness of the servo-sensor mechanism, positive outcomes were revealed due to its fast actuation, confirming that the system was both stable and responsive. This low response time can be attributed to three key factors: (1) the sampling rate of the capacitiveSensor() function is relatively fast due to its direct use of timing loops and interrupt-free logic; (2) the Arduino Uno communicates via Serial at 9600 bps, providing near real-time monitoring; and (3) the servo motor used (MG995, metal gear) has a typical reaction time of approximately 120–150 ms for 60° rotation under standard voltage (6.0 V), as per manufacturer specifications. Additionally, the code does not include complex delay or filtering functions, which helps ensure responsiveness. As shown in the code, when the sensor reading exceeds a defined threshold (if (total1 > 50)), the servo immediately receives a meuServo.write(180) command, resulting in near-instantaneous actuation.
Improving the device’s autonomy is an important consideration. At present, the prosthesis needs to be connected to an external power source, which reduces its practicality for everyday use. Additionally, the current prototype relies on a capacitive sensor that requires wired connections to the processing unit, further limiting convenience. In contrast, Sergeev et al. (2020) incorporate a Bluetooth module to enable wireless communication within their smart prosthesis system, enhancing usability and potentially improving the user experience. Incorporating wireless technology alongside an internal power supply could be a valuable next step to increase the autonomy and user-friendliness of future iterations of this prototype22.
Building on the considerations of usability, further performance evaluations of the prototype focused on analyzing latency and detection accuracy. Taken together, the latency and accuracy analyses confirmed that the prototype operated with fast responsiveness and satisfactory detection precision, making it viable for basic prosthetic applications while highlighting the need for further improvements in sensor shielding and robustness.
Latency testing showed that the prototype responded consistently within a very short time window (median 185 µs), with minimal variation between trials. Detection accuracy reached 84%, with occasional false positives mainly caused by environmental interference. These findings confirm the feasibility of the system for basic prosthetic applications, while also indicating the need for improvements in sensor shielding and robustness.
These findings show that Prototype 1 sustained repetitive operation with minimal performance degradation, supporting its feasibility as a functional low-cost prosthetic device. However, the observations also highlight the importance of improving mechanical durability, particularly regarding thread fixation and elastic resistance, to extend long-term usability.
Prototype 2
Some challenges encountered during the development of Prototype 2 included friction between the plastic phalanges, which was mitigated by sanding the structures, and improper flexing of the distal phalanges caused by the positioning of the internal nylon threads and elastics (Figure 8, Illustration B). Although these issues did not significantly compromise overall finger movement, a more effective solution would have been to secure the elastics to the distal phalanges’ tips rather than their bases.
Regarding the construction of Prototype 2, it can be compared to the study by J.M. Zuniga (2016)23, which also employed 3D printing combined with open-source design editing software. However, as shown in the study by Siegel et al. (2024)24, although open-source 3D-printed prostheses can replicate several functional grips, their performance still falls behind commercial devices when evaluated using standardized protocols such as the Anthropomorphic Hand Assessment Protocol (AHAP). Similar challenges regarding performance and user acceptance have also been reported in the literature, with Bidiss and Chau (2007)25 noting high rates of prothesis abandonment when devices fail to meet functional expectations.
Additionally, the integration of servomotors into Prototype 2 and the subsequent execution of standardized tests could not be completed. This limitation was primarily due to constraints inherent to the school research environment, including limited access to laboratory facilities and time restrictions within the academic calendar.
Nevertheless, constructing Prototype 2 proved valuable in demonstrating the feasibility of a more anatomically accurate design and offered key insights for future iterations. Further studies in a more structured research setting will be necessary to validate its functional performance and to enable a direct comparison with Prototype 1, particularly focusing on the incorporation of robotic components, as successfully implemented in Prototype 1.
Comparison with literature benchmarks
When compared with functional benchmarks proposed in the prosthetics literature16, our prototypes show partial alignment. Prototype 1 weighed only ~200 g, which is under the recommended 500 g threshold for comfortable daily wear. It was able to lift up to 500 g, demonstrating basic grip capability, though this falls short of the ~65 N pinch force considered ideal. The system also responded in under 200 ms to user input, indicating a level of responsiveness comparable to the minimal functional threshold for actuation speed. However, the prototypes lacked powered thumb adduction, which is crucial for grasp versatility16, and their durability was not tested against long-term use. Prototype 2, although anatomically more realistic, did not integrate active motors and therefore could not be evaluated against the full set of benchmarks. These findings suggest that while our models meet some essential criteria, such as low weight and responsiveness, further work is required to achieve the versatility, strength, and durability expected of fully functional prosthetic hands.
Final Considerations
Considering the materials used in the assembly of the prosthesis and excluding the energy source required for its operation (in this case, a computer), it was concluded that a functional prosthesis can be produced for less than USD 40, as the total material cost remains below this threshold. Moreover, the prototype’s movement was successfully demonstrated, though limited to a claw-like grasping motion. Due to budgetary limitations, the sensor employed was not specifically designed for this application; its high sensitivity may potentially interfere with precise control of the prosthesis. Despite this, the project can be deemed successful, as it achieved finger movement to lift objects alongside integration of a functional capacitive sensor.
Acknowledgements
The authors would like to acknowledge Fabricio Masutti and Matheus Silva, STEAM teachers at Colegio Bandeirantes, for their guidance and support in the development of this project.
References
- R. G. E. Clement, K. Bugler, C. Oliver. Bionic prosthetic hands: A review of present technology and future aspirations. The Surgeon 9(6), 336–340 (2011). [↩]
- Secretaria Nacional de Promoção dos Direitos da Pessoa com Deficiência. Cartilha do Censo de 2010: Pessoas com deficiência. Brasília: Secretaria Nacional de Promoção dos Direitos da Pessoa com Deficiência https://media.neliti.com/media/publications/578138-resilience-in-people-with-traumatic-spin-3eb29f61.pdf (2012). [↩]
- K. A. Samuelsson, O. Töytäri, A. L. Salminen, A. Brandt. Effects of lower limb prosthesis on activity, participation, and quality of life: a systematic review. Prosthetics and orthotics international, 36(2), 145-158. (2012). [↩]
- R. Sinha, W. J. van den Heuvel, P. Arokiasamy. Factors affecting quality of life in lower limb amputees. Prosthetics and orthotics international, 35(1), 90–96. (2011). [↩]
- HistóriaBlog. Ambroise Paré, um inovador que revolucionou a medicina no século XVI. https://historiablog.org/2024/01/26/ambroise-pare-o-medico-que-revolucionou-a-medicina-no-seculo-xvi/ (2024). [↩]
- C. K. McGimpsey, T. A. Bradford. Limb prosthetics services and devices: Critical unmet need worldwide. IEEE Engineering in Medicine and Biology Magazine, 25(5), 29–37 (2006). [↩]
- J. Segil, S. A. Huddle, R. F. Weir. Functional assessment of a myoelectric postural controller and multi-functional prosthetic hand by persons with trans-radial limb loss. Journal of NeuroEngineering and Rehabilitation 13(1), 62 (2016). [↩]
- P. J. Kyberd, P. H. Chappell. The Southampton Hand: An intelligent myoelectric prosthesis. Journal of Rehabilitation Research and Development 31(4), 326–334 (1994). [↩]
- I. Ku, J. Y. Lee, K. Y. Choi, K. Y. Lee, H. Lee, D. H. Kim. Clinical outcomes of a low-cost single-channel myoelectric-interface three-dimensional hand prosthesis. Archives of Plastic Surgery 46(4), 303–310 (2019). [↩]
- J. Simon. Unlimbited Phoenix Hand https://hub.e-nable.org/s/e-nable-devices/wiki/page/view?title=Unlimbited+Phoenix+Hand (2021). [↩]
- J. Simon. Osprey Hand https://hub.e-nable.org/s/e-nable-devices/wiki/page/view?title=Osprey+Hand (2021). [↩]
- L. Dunai, M. Novak, C. G. Espert. Human hand anatomy-based prosthetic hand. Sensors 21(1), 137 (2021). [↩] [↩]
- D. Farina, et al. The extraction of neural information from the surface EMG for the control of upper-limb prostheses: Emerging avenues and challenges. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 22(4), 797–809 (2014). [↩]
- M. R. Williams, W. Walter. Development of a prototype over-actuated biomimetic prosthetic hand. PLOS ONE 10(3), e0118817 (2015). [↩]
- J. Zuniga, D. Katsavelis, J. Peck, J. Stollberg, M. Petrykowski, A. Carson, C. Fernandez. Cyborg beast: a low-cost 3d-printed prosthetic hand for children with upper-limb differences. BMC research notes, 8(1), 10 (2016). [↩]
- M. C. Carrozza, G. Capiello, S. Micera, B. B. Edin, L. Beccai, C. Cipriani. Design of a cybernetic hand for perception and action. Biological cybernetics, 95(6), 629-644 (2006). [↩] [↩] [↩]
- J. T. Belter, J. L. Segil, A.M. Dollar, R. F. Weir. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. Journal of rehabilitation research and development, 50(5), 599 (2013). [↩]
- G. Kondo. HACKberry: 3D-printable Open-source bionic arm https://www.exiii-hackberry.com/ (2023). [↩]
- S. B. Godfrey, K. D. Zhao, A. Theuer, M. G. Catalano, M. Bianchi, R. Breighner, D. Bhaskaran, R. Lennon, G. Grioli, M. Santello, A. Bicchi, K. Andrews. The SoftHand Pro: Functional evaluation of a novel, flexible, and robust myoelectric prosthesis. PloS one, 13(10), e0205653 (2018). [↩]
- A. Satriawan, W. Trusaji, D. Irianto, I. Anshori, C. Setianingsih, E. Nurtriandari, & R. Z. Goesasi. Karla: A simple and affordable 3-d printed body-powered prosthetic hand with versatile gripping technology. Designs, 7(2), 37 (2023). [↩]
- M. Atzori, H. Müller. Control capabilities of myoelectric robotic prostheses by hand amputees: A scientific research and market overview. Frontiers in Systems Neuroscience 9, 162 (2015). [↩]
- A. M. Sergeev, A. A. Solovyev, N. S. Kovalev. Smart prothesis: Sensorization, humane vibration and processor control. In International Conference on Computer Science, Engineering and Education Applications (pp. 477-486). Cham: Springer International Publishing (2020). [↩]
- J. M. Zuniga, J. Peck, R. Srivastava, D. Katsavelis, A. Carson. An open source 3D-printed transitional hand prosthesis for children. Journal of Prosthetics and Orthotics 28(3), 103–108 (2016). [↩]
- J. R. Siegel, A. H. Valero-Cuevas, A. Kontson. A performance evaluation of commercially available and 3D-printable prosthetic hands: a comparison using the Anthropomorphic Hand Assessment Protocol. BMC Biomedical Engineering, 6(1), 8 (2024). [↩]
- E. A. Biddiss, T. T. Chau. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthetics and Orthotics International, 31(3), 236–257 (2007). [↩]



{kind=link}